V
主页
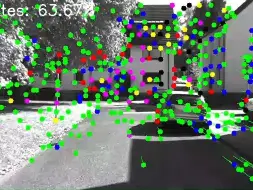
把SuperPoint和SuperGlue用于VINS的前端追踪是坏主意
发布人
WHY NOT A GOOD IDEA? 1.计算量 2.本身IMU可以部分补偿光照变化和快速运动带来的视觉问题 3.spsg真正出彩的地方是wide baseline matching,用在帧间tracking可能不能发挥潜力 4.单目下我这种实现会有特征点丢失问题 --- code: https://github.com/ercbunny/open_vins report: https://www.overleaf.com/read/nhxpbrzymgrd
打开封面
下载高清视频
观看高清视频
视频下载器
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
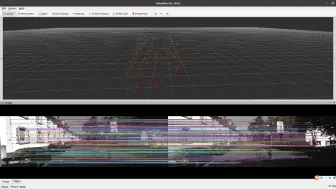
SuperPoint+LightGlue KITTI数据集 特征跟踪实验
VINS-MONO + YOLOX + superpoint + superglue
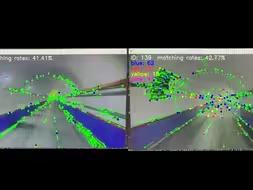
特征匹配实验(左SIFT+LightGlue 右SuperPoint+LightGlue)
基于SuperGlue的无人机卫星无GNNS导航
VINS+Superpoint+Superglue基于学习的方法代替VINS中的特征点提取和跟踪方法
真实场景测试ORB_SLAM3,感觉VINS打不过!
EPLF-VINS前端 光流法跟踪点线特征
Vins-Mono复现
【CVPR 2020】基于深度学习的视觉 SLAM 前端: SuperPoint, SuperGlue, and SuperMaps
本科毕设 | VINS + Surfel Dense Mapping + UAV
OmniHex结题演示视频
CVPR 2020 | 深度学习视觉前端_SuperPoint, SuperGlue, and SuperMaps
open-vins 跑euroc数据集
superpoint superglue 特征匹配tensorrt加速
在宿舍跑ORB-SLAM2
SuperPoint+LightGlue在kitti数据集上的实验
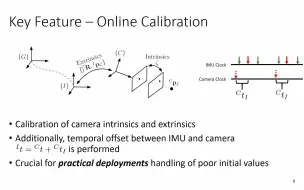
OpenVINS Paper Presentation - ICRA 2020
SuperPoint作者演讲(中英字幕):Self-Supervised Interest Point Detection and Description
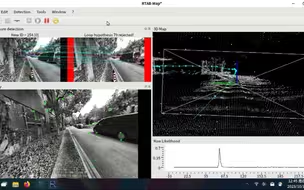
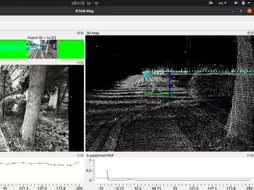
RTAB-Map+OpenVINS+OAK-SuperPoint
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法
ICCV2023 SLAM 挑战赛 LET-VINS方案
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
OmniHex中期演示视频
EPLF-VINS
基于深度学习的特征点提取,特征点检测的方法总结
VIO主流框架&VINS推导解析
在OAK相机上加速SuperPoint并使用RTAB-Map建图
vins_fusion without ros while keeping loopclosing(2)
ORBSLAM3纯视觉建图和导航
基于视觉的高精地图定位demo
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
告别词袋模型,也无需GPU,VSLAM的完美边缘计算解决方案,现已加入RTAB-Map大礼包
LightGlue:最强轻量级特征匹配?
SuperPoint和SuperGlue 的算法介绍及学习应用经验分享
【ICRA2021】鲁棒单目视觉惯性深度的嵌入式系统的实现
特征匹配新高度!ICCV 2023 慕尼黑工业大学提出: 端到端多视图特征匹配方法
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
深度学习与SLAM的结合新范式:基于轻量级CNN网络打破光流法中的光照一致性假设
特征匹配新范式!ICCV 2023 GlueStick:将点和线粘在一起实现稳健的图像匹配