V
主页
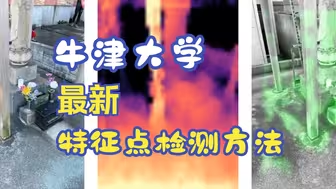
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
发布人
错误的特征匹配对后续的相机姿态估计有严重影响,并且通常需要额外的、耗时的措施,如RANSAC,来拒绝异常值。我们的方法通过联合处理特征匹配和姿态优化来应对这一挑战。与SuperGlue相比,多视图匹配与端到端训练相结合将Matterport3D的姿势估计指标提高了18.5%。 论文链接:https://arxiv.org/abs/2205.01694 https://www.youtube.com/watch?v=uuLb6GfM9Cg
打开封面
下载高清视频
观看高清视频
视频下载器
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
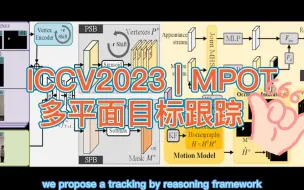
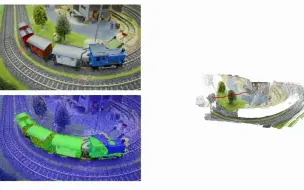
ICCV2023 | MPOT:多平面目标跟踪
最新!如何使用深度强化学习在未知环境中进行导航?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
端到端数据格式是什么样的?快来看看吧
ICCV 2023 | CLNeRF:持续学习遇到NeRF
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
端到端算法是什么?自动驾驶领域是怎么做的?
ICCV 2023 | 实现实时六自由度物体跟踪,深度主动轮廓模型DeepAC来了
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
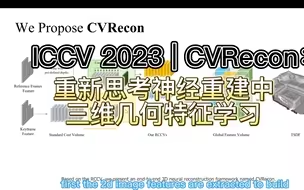
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
PLUTO算法详解:端到端首次超越基于规则的方法
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
【ECCV 2022】Google最新视觉主干MaxViT大放异彩:分类准确率再创新高
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!