V
主页
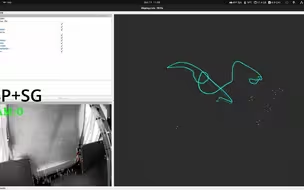
VINS+Superpoint+Superglue基于学习的方法代替VINS中的特征点提取和跟踪方法
发布人
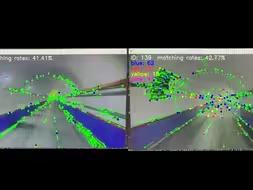
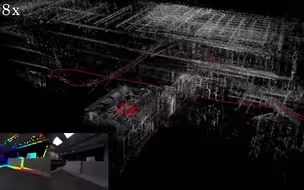
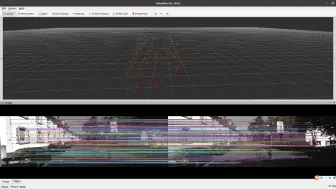
使用基于学习的特征点监测方法Superpoint和匹配方法SuperGlue替换掉VINS中的特征点提取和跟踪,在测试时分别测试了TensorRT和Libtorch的部署方式,并在Euroc数据集上进行了测试,得到与VINS基本一致的结果。哈哈这些都是小打小闹,任重而道远啊,比起精度更希望接下来能在鲁棒性方面做出一些优秀工作!
打开封面
下载高清视频
观看高清视频
视频下载器
把SuperPoint和SuperGlue用于VINS的前端追踪是坏主意
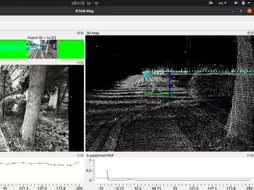
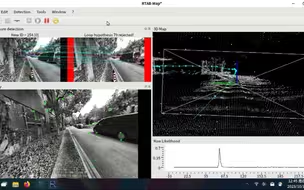
告别词袋模型,也无需GPU,VSLAM的完美边缘计算解决方案,现已加入RTAB-Map大礼包
EPLF-VINS前端 光流法跟踪点线特征
LightGlue:最强轻量级特征匹配?
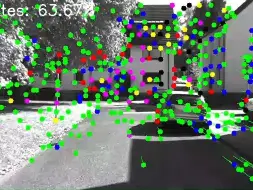
SuperPoint+LightGlue KITTI数据集 特征跟踪实验
本科毕设 | VINS + Surfel Dense Mapping + UAV
VINS-MONO + YOLOX + superpoint + superglue
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
基于深度学习的特征点提取,特征点检测的方法总结
真实场景测试ORB_SLAM3,感觉VINS打不过!
基于SuperGlue的无人机卫星无GNNS导航
RTAB-Map+OpenVINS+OAK-SuperPoint
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
vins不知道怎么调了,飘的一批
SLAM算法解析之VINS-Mono(一)
特征匹配实验(左SIFT+LightGlue 右SuperPoint+LightGlue)
【手写VIO教程】从零开始实现双目视觉惯性里程计系统-预告视频(1)
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
superpoint superglue 特征匹配tensorrt加速
特征匹配新高度!ICCV 2023 慕尼黑工业大学提出: 端到端多视图特征匹配方法
Ego-Planner+VINS-Fusion实机自主导航
ICCV 2023【已开源】| 苏黎世联邦理工学院和微软联合发布,特征匹配的新纪元:LightGlue,速度与准确性的完美融合!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
基于腿足里程计的改进LVI-SAM
ICCV2023 SLAM 挑战赛 LET-VINS方案
VINS-Mono based on superpoint and superglue in EuRoC MAV Dataset (MH_04_difficu)
【DEMO】高帧率VIO测试样例
【CVPR 2020】基于深度学习的视觉 SLAM 前端: SuperPoint, SuperGlue, and SuperMaps
【即将开源】DM-VIO:仅单个相机和IMU优于双目惯性方法!RA-L
VINS-Mono based on superpoint and superglue in EuRoC MAV Dataset (V2_03_difficu)
EPLF-VINS
[待投] 基于不确定性分析的激光SLAM后端图优化
SuperPoint+LightGlue在kitti数据集上的实验
在OAK相机上加速SuperPoint并使用RTAB-Map建图
实时室内三维重建小Demo-自行编写的定位和建图模块
视觉SLAM定位算法
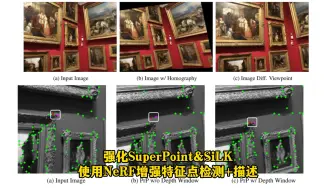
强化SuperPoint & SiLK!使用NeRF增强特征点检测+描述!
特征匹配新范式!ICCV 2023 GlueStick:将点和线粘在一起实现稳健的图像匹配
深度学习与SLAM的结合新范式:基于轻量级CNN网络打破光流法中的光照一致性假设
基于orbslam3的rgbd三维重建(ros版)