V
主页
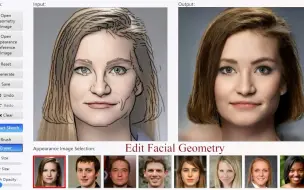
【最新开源】动手P图太麻烦?NTU、港中大推出对话美颜系统!
发布人
源自https://www.youtube.com/watch?v=ZKMkQhkMXPI&t=3s 被ICCV2021接收 论文名称:Talk-to-Edit: Fine-Grained Facial Editing via Dialog 作者:Yuming Jiang*, Ziqi Huang*, Xingang Pan, Chen Change Loy, Ziwei Liu 代码地址:https://github.com/yumingj/Talk-to-Edit
打开封面
下载高清视频
观看高清视频
视频下载器
视频换图?全程高能,可应用于AR和视频编辑!港中大等即将开源,SIGGRAPH2022!
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
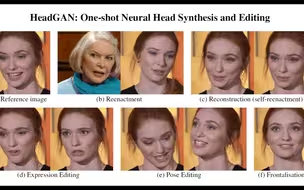
【前沿论文】帝国理工&华为提出头部合成和编辑算法,ICCV 2021
【TUM即将开源】滑动窗口光束平差的平方根边缘化,ICCV2021
成长 DEVELOPMENT |《机甲大师 第五季(2024)》第一集
【全集188集】深度学习必看圣经!李沐大神《动手学深度学习》最新版全套视频教程分享,比啃书高效!看完直接跑通!(深度学习/神经网络/计算机视觉)
港中大最新开源|2D秒变3D,基于2D场景风格化的光线配准!CVPR2023
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
CMU最新发布首个记忆增强的终身SLAM系统,源自大脑中记忆重放机制的启发!
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
即将开源!UCSD最新研究CoordGAN:人脸变雕像和油画,汽车颜色随便调 | CVPR2022
【原创】优秀开源代码盘点:稀疏视觉SLAM/SfM
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
【开源】中科院研究的智能P图神器!想改哪里画哪里!SIGGRAPH 2021
【开源】DSOL:一种快速直接稀疏里程计方案,处理速度提高5倍!宾夕法尼亚大学
【开源】CVPR2022|UBC&谷歌研究光场渲染的新视图合成,可准确再现场景!解决了反射、折射和半透明等问题!
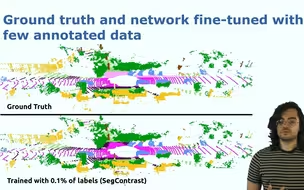
波恩大学最新开源代码!自动驾驶场景自监督三维点云表征学习,无需标注,RAL/ICRA 2022!
手把手带你入门SLAM
机器人能从猫猫身上学到什么?
ICRA22 CMU机器人所讲座 | 机器人自主导航开发环境
AR界面也能操控无人机了,只需用手轻轻一碰
深度学习三维重建学习计划
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
如何让美颜风格化后图像现原形?港科大最新图像复原方法!AAAI 2022
CMU最新发布|不同环境下机器狗的360°相机定位,能自动规避障碍物,快速又准确!
20分钟学会qwen大模型本地部署+微调法律大模型(只需5G内存)
【信息论】香港中文大学—中英字幕
深度学习特征实现机器人长期视觉定位,白天夜里什么光照都hold住!ICRA/RAL 2022
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
手把手教你编译运行VINS代码
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
立体匹配算法原理与应用-奥比中光
北航小姐姐带你精读SLAM综述论文
加州大学搞定透明物体的三维重建,代码开源!
稳如老狗!机器人被绑住手还能玩魔方!
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
【线下讲座】占云龙:SLAM技术发展与存在的问题
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
北理工小姐姐视觉SLAM学习经验分享