V
主页
【CAIRDC2020】高翔 - 《SLAM在自动驾驶中的应用和难点》
发布人
https://www.aiimooc.com/mall/preshow-htm-itemid-612.html 【第三届】中国人工智能与机器人开发者大会 CAIRDC 2020 智行者SLAM专家,清华大学博士,慕尼黑工业大学博士后 高翔 主题报告《SLAM在自动驾驶中的应用和难点》
打开封面
下载高清视频
观看高清视频
视频下载器
【CAIRDC2020】宋宇 - 《多源信息融合SLAM及应用》
视觉SLAM算法特征点法详解
【CAIRDC2020】沈劭劼 - 《Perception and Navigation in Complex Environments》
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
《松灵ROS 2开讲啦》第六期 Nav2导航应用
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
带 SLAM 和 Nevegation2 的 ROS2
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
超级详细的C++方向技术栈
8月23日组会:RGBD GS-ICP SLAM
大疆livox-mid360定位
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
一起来啃书!【视觉SLAM十四讲】 ,全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!—(计算机视觉、机器学习、神经网络、OpenCV)
激光slam精度验证,强光环境地面点精度,RTK参数转换大地高转85高,精度验证
【3D数学】欧拉角万向节死锁与插值
吴佩对话余凯 | 十年,手动驾驶将成为新闻
乐道L60的空间智舱,真比Y更香?
SLAM与三维重建的区别
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
理想L9自动泊车,车“跑”了
SLAM中的位姿估计量为什么用转移矩阵T表示
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
【C++面试100问】第九十九问:char*和char[]的区别是什么
CVPR'24 开源|特征匹配新范式:从语义区域到点的匹配框架
大疆livox-mid360室外定位
无人机室内自主飞行,和地面站操作
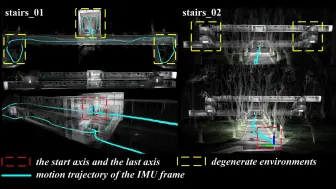
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
阿木SU17在无GPS弱光环境下依靠四目SLAM定位飞行展示
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
套件课程--LIO-SAM的介绍和使用
赛事案例|贵州大学赵梓衡团队基于LIMO开发“基于ROS的双上位机大模型语音交互目标检测SLAM导航室内智能车”项目
激光slam相对坐标精度,科力达slam车库室内操作
0接管,小鹏5.3.0先锋版4晚高峰一镜到底
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
微型无人机群SLAM
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ