V
主页
【第二届全国SLAM技术论坛】刘勇-多源融合SLAM:现状与挑战
发布人
【第二届全国SLAM技术论坛】刘勇-多源融合SLAM:现状与挑战 报告摘要 本报告将针对目前SLAM在实践应用中面临的多种挑战问题开展介绍,分享目前的技术解决方案和最新进展。
打开封面
下载高清视频
观看高清视频
视频下载器
【纪录片】这就是中国 第247集 美国军事霸权正迅速丧失
5-1 特征点提取与匹配
【纪录片】这就是中国 第249集 巴黎奥运会的中国风
【第二届全国SLAM技术论坛】SLAM技术入门与进阶
概率机器人
【顾险峰】【中英字幕】计算共形几何系列课程
罗斌《基于多源传感器数据融合的动态场景SLAM研究》
2-1 点与坐标系
【3D数学】欧拉角万向节死锁与插值
冒死上传(已离职)!学习一小时抵过十小时!目前B站最完整的高效学习方法教程!超实用学习方法,教你高效学习 逆袭就靠这个了!让你学习效率暴涨300%!
视觉SLAM算法特征点法详解
SLAM技术论坛分享
冒死上传(已被开除)【目前B站最完整的记忆力训练教程】超实用记忆术,教你快速记忆 冲刺背书就靠这个了!海马体记忆法,让你记忆效率暴张300%!
【浙大谭平】从相机标定到视觉SLAM
【3D数学】认识欧拉角
ORB-SLAM2源码解读
民法法考六页纸(含新增和命题规律)
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
有缘人见
自律+方法+努力+坚持+时间,敢不敢花30天蜕变干掉平庸的自己!狠不下心不要进来!学习比游戏还爽个100倍?!学会这些高效学习方法论,让你效率暴涨,学到上瘾!
多传感器融合四足机器人本体感知算法
(8小时爽片)大国崛起要从科技入手,绝对不是人情世故
1-2 SLAM是什么
韩钢教授:1976年到1978年的中国
高中化学孤电子对数的新(心)算法
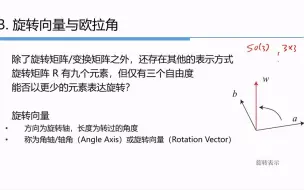
2-3 旋转向量和欧拉角
SLAM-无人驾驶、VR/AR
比啃书高效!清华博士高翔:【视觉slam基础知识从理论到实践】视频教程
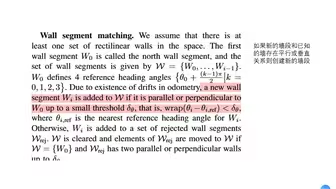
9月13日组会:Trajectory-Based SLAM for Indoor Mobile Robots with Limited Sensing Cap
【面向对象编程 by Mosh】
ORB_SLAM3实跑教程
文伟松 - 3D LiDAR Aided GNSS Positioning in Urban Canyons
【小白教程】使用 PSMNet 估计视差和计算双目深度,并映射到 3D 点云
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
当你学习落下太多,不知道从何补起的时候,请看看这套视频。来看看学神的正确姿势!颠覆你认知的学习方法,效率提升300%超有效的学习方法,不熬夜考北大!
SLAM与三维重建的区别
《松灵ROS 2开讲啦》第六期 Nav2导航应用
压缩感知和消息传递
【杨聪锟教授最新力作】数字电子技术基础:B站首发,含金量懂的都懂!
【全748集】清华大佬终于把Python整理成动画片了,通俗易懂,2024最新版!全程干货无废话,学完即可就业!拿走不谢,学不会我退出IT圈!