V
主页
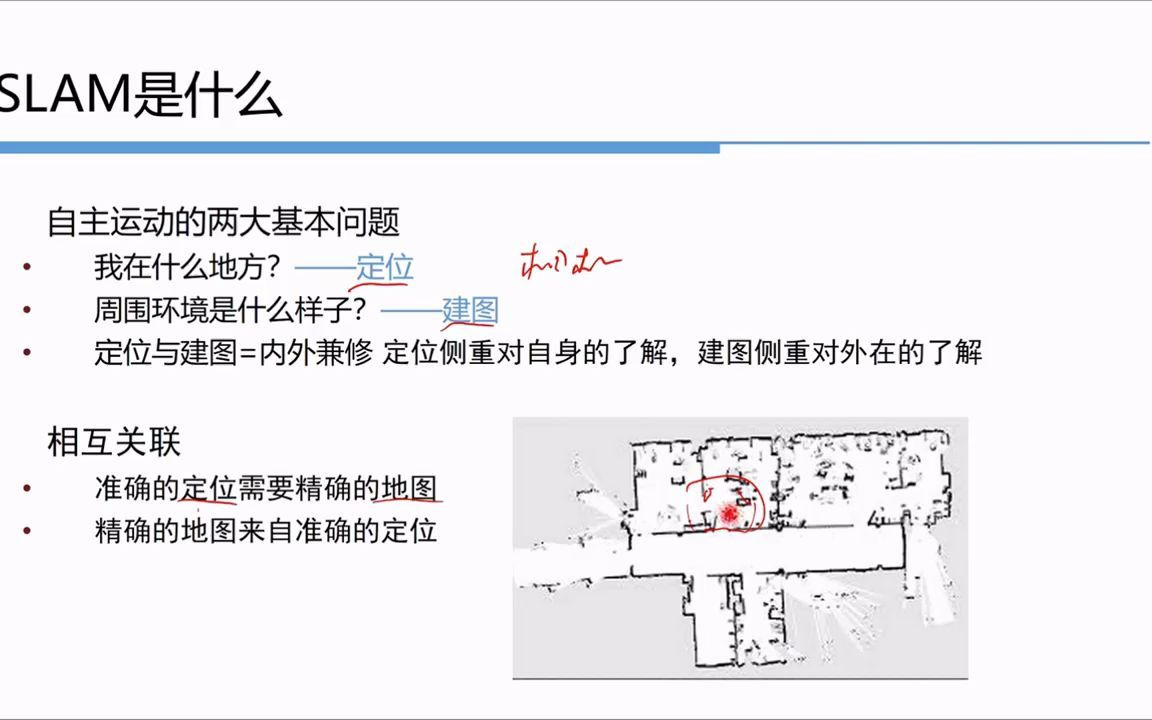
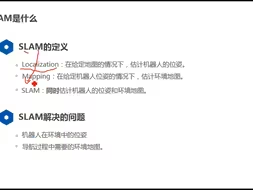
1-2 SLAM是什么
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
5-1 特征点提取与匹配
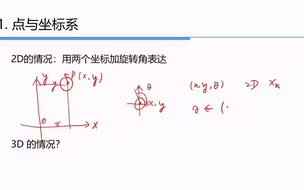
2-1 点与坐标系
2-2 旋转矩阵
1-3 视觉SLAM的数学描述
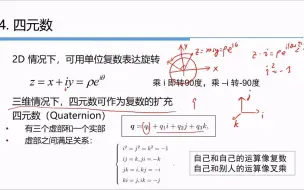
2-4 四元数
1-4 Linux下的C++基础
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
有缘人见(上)
SLAM技术论坛分享
SLAM算法(浙软夏令营)废柴大学生的所作所为
激光SLAM重定位视频1
Unitree 2024 ROS暑期学校课程视频03-人形机器人运动控制分享
比萝卜快跑还强悍!【基于深度学习的无人驾驶】2024年B站最好的自动驾驶系列知识课程!从入门到精通!带你吃透自动驾驶原理!
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【雷达-相机协同定位】LiDAR-Vision Tightly Coupled Collaborative Positioning
OmniSLAM:宽基线多相机系统的全方向定位和稠密建图
最后还是用amcl定位才连续成功导航了三次
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
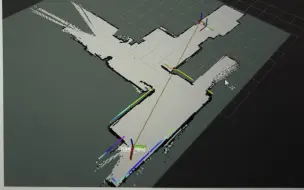
高翔-大规模点云地图的自动化构建
【浙大谭平】从相机标定到视觉SLAM
Moveit!
【ICRA2021】固态激光雷达的轻型三维定位和建图
ROS2用slam_toolbox建图,树莓派猪脑过载
ROS基本概念与ROS架构
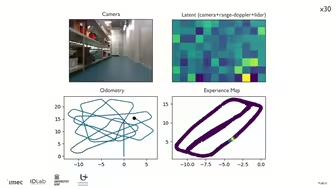
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】HyperMap:单目相机注册的压缩3D地图
AVP-SLAM- 停车场内自主车辆的语义视觉地图构建与定位
【算法进阶】【前后缀优化建图】前后缀建图技巧-信息学竞赛
【镭神智能】雷祖芳《激光雷达及其感知、定位导航应用》
可视化:RVIZ,机器人仿真,ROS2
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
ROS与无人赛车RaceCar
【ICRA2021】3505-MOLTR:单目RGB视频的多目标定位、跟踪和重建
【ICRA2021】3672-基于多分辨率边界的自主三维勘探规划器
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
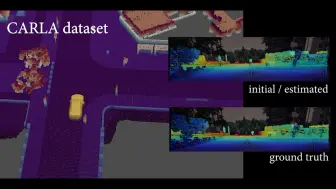
具有概率监督的端到端定位的 2D-3D 跨模态网络
【ICRA2021】半动态环境中的终身定位
3738-来自两个UAV的分布式可变基线双目SLAM
反光柱部署简单演示
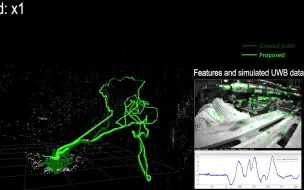
【ICRA2020】紧耦合单锚超宽带辅助单目视觉里程计