V
主页
机器人强化学习 DDPG-6DOF-Lift
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
三指灵巧手,强化学习手内灵巧操作连续成功
on-policy 机器人抓取,性能超越Dex-Net
6DOF抓取方法graspnet-1Billion测试
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
机器人抓取检测(demo)
Unity使用自己的强化学习算法(DQN)训练智能体——学习日记
深度强化学习Carla实战-SAC算法(二)--SAC-Carla训练过程
“抓娃娃机” 2.0
机器人开门 - science robotics - 日本早稻田大学
UR5e抓取测试
小到U盘,大到石头,万物可抓的平面抓取检测算法
基于深度学习的“自动抓娃娃机”
1.强化学习简介
会飞的自行车!自行车强化学习跳跃
国产蜡像Ai手办机器人,不比马斯克机器人差
强化学习教父Sutton持续反向传播算法登Nature!证明深度学习还不如浅层网络
青龙人形机器人开源强化学习库GymLoong测试
从模型预测控制到强化学习-11:确定性策略梯度DPG与随机策略梯度SPG,从控制的角度理解(D)DPG, A2C, QAC, REINFORCE
37.多智能体强化学习
强化训练Cot成为新的scaling law Cot为什么让大模型变强? 斯坦福论文揭秘
AFFGA-Net 机器人抓取实验
[上]6个人形双足强化学习开源项目,论文讲解,代码速读,FLD,PBRS,footstep,ExBody,humanplus,humanoid-gym
使用spacemouse遥控UR5e完成零件装配任务
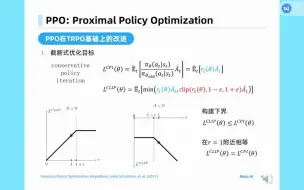
25.PPO
蜡像Ai空姐机器人
新算法的抓取演示
使用普通商用零件低成本DIY构建四足机器人然后基于强化学习控制
39.多智能体强化学习进阶
强化学习框架-Legged Gym 训练代码详解
38多智能体强化学习入门
6-DOF GraspNet_ Variational Grasp Generation for Object Manipulation
使用pybullet进行仿真抓取
强化学习付费教程!强化学习实战系列,最全最完整的强化学习教程从零基础开始教学,学完可实战!
使用运动约束强化学习的四足机器人
5.基于模型的强化学习
GPT-4o玩黑神话悟空? 阿里研究纯靠大模型无需强化学习,精英怪胜率持平人类玩家
【科普报告视频分享】西安交通大学兰旭光教授:基于视觉推理与学习的机器人自主作业
31.逆强化学习
基于强化学习的机械臂固定时间轨迹跟踪控制仿真【复现】
通过残差强化学习实现近距离四轴飞行器的稳健控制 四旋翼