V
主页
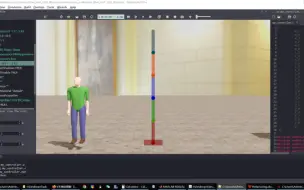
C实现MPC模型预测控制二次规划QP算法应用于倒立摆Webots仿真Model Predictive Control Quadratic Programming
发布人
C语言MPC控制算法并部署在一阶直线倒立摆Webots仿真模型中(MPC C-language IPC Webots Implementation)依旧使用Windows Webots自带编译环境及裸C实现控制,无库依赖或集成软件包平台等,所见即所得。倒立摆是一个单输入两自由度欠驱动非线性机械系统,是进行控制理论教学及开展各种控制实验的理想实验平台。 此Demo对于初学者入门MPC控制算法及其C语言实现和Webots建模控制仿真有全面性帮助;离散时间模型预测控制(DMPC, Discrete-time Model Predictive Control) #倒立摆 #Webots #MPC #C语言 #控制算法 #QP #Quadprog #二次规划
打开封面
下载高清视频
观看高清视频
视频下载器
C语言二次规划QP算法及MPC模型预测控制算法应用于二级倒立摆Webots仿真模型
双足轮机器人LQR控制——C语言Webots仿真轮腿式双轮足机器人(WLHR, Wheel-Leged Hybrid Robot)双足双轮双足
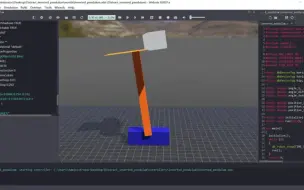
Webots倒立摆NMPC起摆控制C语言实现——SQP序列二次规划于非线性模型预测控制倒立摆SwingUp
Webots二级倒立摆MPC控制——C语言实现二次规划QP算法及MPC模型预测控制算法
基于MATLAB的一阶倒立摆系统仿真(模型+word报告)
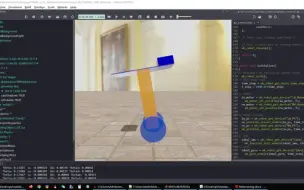
Webots倒立摆MPC控制——C语言模型预测控制二次规划QP算法 Model Predictive Control Quadratic Programming
【Python】人形机器人——模型预测控制
四级倒立摆LQR控制——C语言Webots仿真四阶倒立摆(Four-Link Inverted Pendulum System)
【顶刊复现】基于MPC模型预测控制水下机器人AUV的路径跟踪
C代码NMPC倒立摆起摆控制Webots仿真——非线性模型预测控制及序列二次规划SQP应用
Webots一阶直线倒立摆LQR控制仿真(IPS, Inverted Pendulum System)
【超多模型MPC算法】开源Mujoco-MPC演示
Webots仿真SolidWorks模型导入仿真
基于MPC模型预测控制的四旋翼路径跟踪仿真设计(状态空间模型)
Webots 仿真一维动量倒立摆 Cubli 控制系统
【基于深度强化学习的冠军级别无人机竞速】强化学习和模型预测控制MPC中英字幕18讲!
【DC/DC】P2:基于模型的 DC-DC 转换器控制算法调参与硬件部署
七级倒立摆LQR控制——Webots仿真C语言控制七阶倒立摆(Seven-Link Inverted Pendulum System)
简化平衡步兵LQR控制Webots仿真C语言——带平台的两轮平衡车
五级倒立摆LQR控制——C语言Webots仿真五阶倒立摆(Five-Link Inverted Pendulum System)
Handle Robot ?
FOC动量飞轮倒立摆
Webots一阶直线倒立摆PID控制仿真(IPS, Inverted Pendulum System)
基于STM32H723的一维动量倒立摆Cubli控制系统
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
Webots二级倒立摆LQR控制系统仿真(DIPC, Double Inverted Pendulum on a Cart)
【51单片机Proteus仿真】0基础手把手教你实现流水灯
基于优化的敏捷足式机器人控制与规划
双足轮机器人自由式飞坡合辑——C语言Webots仿真轮腿式双轮足机器人花式飞坡(WLHR, Wheel-Leged Hybrid Robot)
Bipedal Robot Locomotion System
Webots仿真Cubli一维动量倒立摆控制系统
三级倒立摆LQR控制——C语言Webots仿真三阶倒立摆(TIPS, Triple Inverted Pendulum System on a Cart)
【全700集】目前B站最全最细的C语言零基础全套教程,2024最新版,包含所有干货!七天就能从小白到C语言大神!少走99%的弯路!存下吧!很难找全的!
【非PID】自适应控制算法效果演示
六级倒立摆LQR控制——C语言Webots仿真六阶倒立摆(Six-Link Inverted Pendulum System)
The Nature of PID Control
四足机器人足臂协同 ocs2 qm_control 开源项目学习
「精校熟肉」Optimal Control-最优控制(CMU 16-745) 2024-L6-确定性最优控制导论
Webots下肢二连杆的反演控制——C语言实现Backstepping反步控制
Actuator H723: Orthogonal Field-Oriented Control using Space Vector Modulation