V
主页
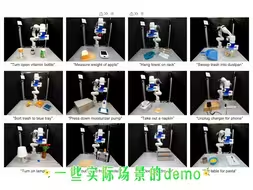
具身智能综述下
发布人
对具身智能前沿技术的综述,欢迎大家加群交流,一起进入具身智能行业
打开封面
下载高清视频
观看高清视频
视频下载器
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
李飞飞团队最新成果,基于大模型的机械臂抓取
具身大模型新进展:星尘智能与π0官宣合作,最强AI机器人再进化!
2024斯坦福AI教母 李飞飞巨作❗AI Agent综述🔥速看!
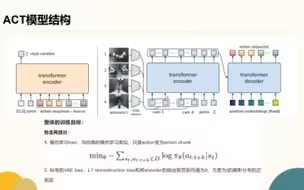
斯坦福ACT算法原理2-ACT模型
斯坦福ACT算法原理1-生成式模型(具身智能)
大模型在具身智能中的应用
具身智能-通用抓取综述(model base 3D视觉派)
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
AI领域要变天了,起因就是这本联合了斯坦福、微软、UCLA和华盛顿大学以及李飞飞撰写的论文综述
云深处发布托马斯回旋风火轮足机器人
Diffusion Policy 结合 PPO 模仿+强化 (下)
NeurIPS'24 | 原语驱动的世界模型 PIVOT-R实现任务泛化与效率双重 提升,成功率超过谷歌RT-1 26.6%
具身智能-ACT代码框架啊
遥操作库Humanoid Arm Retarget详解(作者王文灏主讲)
斯坦福ACT算法原理3-面试经验
全网首个灵巧手课程-灵巧手综述
星尘智能 Astribot S1 x Physical Intelligence π0
具身智能课程-pybullt仿真器学习第三课搭建自己的具身智能学习平台
具身智能公司-宇树科技
我们是如何实现直膝行走的?
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
0基础学习具身智能第一步,仿真数据使用
具身智能公司合集-智元机器人
具身智能技术综述上
清华赵明国:智能人形机器人≠智能+人形 | 智者访谈
为何具身智能如此火爆?看完这篇最新全面综述就懂了!“稚晖君”全球开源灵犀X1 ,李飞飞团队新作Voxposer
台湾抽象于北辰:要用粘鼠板打败我们的机械狗
星尘智能全能家居宣传片全网最全技术亮点解读
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
具身智能课程-pybullt仿真器学习第一课
英伟达新利器fVDB:开启生成式物理智能 AI 的新时代
具身智能常用AI工具-必看
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
具身智能公司-大疆
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan
全网最专业Figure 02视频讲解