V
主页
京东 11.11 红包
0基础学习具身智能第一步,仿真数据使用
发布人
0基础学习具身智能第一步,仿真数据使用
打开封面
下载高清视频
观看高清视频
视频下载器
Aloha-ACT 在单臂上模仿学习仿真系统(基于Coppliasim+RLBench)
具身智能-ACT代码框架啊
何恺明首个具身智能工作!HPT:异构预训练Transformer!收录顶会NeurIPS 2024!
具身智能课程-pybullt仿真器学习第三课搭建自己的具身智能学习平台
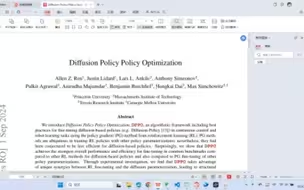
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
面向具身智能从入门到实战课程!课程规划
具身智能课程-pybullt仿真器学习第二课
入门机器人Diffusion Policy
客户案例 | 基于松灵RANGER MINI 3.0底盘的双臂升降式具身智能平台的无限可能
李飞飞团队提出ReKep,让机器人具备空间智能,还能整合GPT-4o!视觉与机器人学习的深度融合
【直播回放】具身智能系列之感知技术课程
具身智能的风口到了吗
具身智能-通用抓取综述(learningl base 端到端派)
超越极限跑酷:仿真强化学习,塑造腿式机器人运动未来
斯坦福ACT算法原理1-生成式模型(具身智能)
具身智能基础简述
全网最专业Figure 02视频讲解
3分钟复现谷歌具身智能框架 - Code as Policies
最佳论文!Robotwin:首个双臂协同机器人策略学习Benchmark
ECCV'24 Oral | 王东林团队提出PiTe:时空对齐视频大模型,增强视频语义理解,提升视频语言模型性能!
大模型为什么跌到了白菜价
多模态语言模型有局限,AI教母李飞飞谈空间智能,3D才能表达世界的本质
遥操作库Humanoid Arm Retarget详解(作者王文灏主讲)
具身智能技术综述上
【圆桌论坛】寻找超级场景:具身智能「用」在何处?
全网首个灵巧手课程-灵巧手综述
强化学习框架-Legged Gym 训练代码详解
智元机器人发布会专业全解析-20分钟带你了解稚辉军新品
通用抓取 ----2D图像分割
代码实现大模型强化学习(PPO),看这个视频就够了。
NoMaD是一种新颖的导航策略,它利用了扩散模型来生成导航轨迹
30元教你学会用Issacgym训练宇树机器狗试听第二期
【B站最详细】使用Ollama+FastGPT快速搭建属于自己的免费本地知识库
AlignBot:个性化具身大模型
具身智能公司-大疆
具身智能公司-宇树科技
上线预告:蔚蓝具身智能产品全矩阵重磅上新,限时优惠 3999元起
RDT-1B:解密全球最大的双臂机器人扩散大模型
这只机器狗成精了 | 像人一样爬梯子 | 欧洲最强机器狗 ANYmal | 具身智能 | 神经网络 | 人工智能 | 四足机器人
AIRS in the AIR | 提升人工智能与具身机器人生态系统:激活数字经济与智能云医疗保健