V
主页
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-方法2- Half- Gaussian问题构造
发布人
在C:MO(Command Mordern Operations)游戏中,近期一直在玩空对地打击任务,其中涉及到一个基本的问题:如何合理地分配炸弹、导弹这些资源?我对问题进行抽象和简化,并建立了一个非线性目标函数、整数规划的问题,采用遗传算法进行求解。在第一集的基础上,对高斯分布作代价函数的缺陷做了一点分析,并提出对代价函数的改进方法,即所谓的Half-Gaussian分布
打开封面
下载高清视频
观看高清视频
视频下载器
【海权:导弹时代的海战/Sea Power】抽象难度欺诈小任务之三英战吕布
CMO难度平面几何之双曲线
FLIR手持3D视觉相机
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-方法1-问题构造
斯坦德物流机器人在中国机器视觉展会的演示
含23高联P4、20CTSTP5讲解!【高中数学联赛二试专题讲座 第九讲】调整法
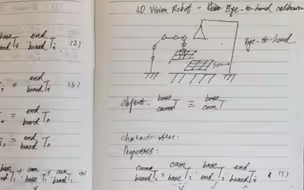
3D视觉机器人的手眼标定流程记录
机器人集群的模拟软件初版搭建完成,能够模拟多机器人、多目标的场景,进行机器人集群的任务分配、路径规划,并且可以进行数据导出和后处理。这里用blender做了一…
浙大机器狗演示
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-编程1-采用遗传算法进行资源分配问题求解
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-方法3-Two-Gaussian问题构造
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
点云中的多物体识别,使用CGAL库,CM
2D视觉机器人的手眼标定流程记录
十月革命纪念日之行
分布式资源分配在机器人集群中的应用动机讨论
CMO难度平面几何之三角法
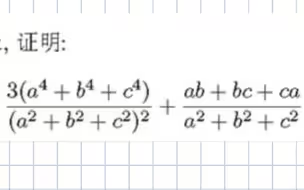
|摘录好题与好解021|舒尔不等式·4道
多智能体系统一致性基础-7-单积分器动力学的一致性
|摘录好题与好解022|美国奥林匹克数学竞赛 2020 P5
【高中数学联赛二试专题讲座 代数篇】第八讲 代数变形(二) SOS方法与舒尔不等式
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
【高中数学竞赛】2022年质心数学 CMO进阶几何 反演精讲-徐云昊授课
多圆柱体识别,设置了5个圆柱体,随机确定
多智能体系统一致性介绍-1-代数图论基础
使用3D相机对定位精度指标进行自动数据采集和评估
3D视觉机器人中手眼标定的精度提升方法记录
机器人集群模拟程序简单演示
中国第一系?北大数院里都是些什么人
Nabla算符的理解记录
在轴角集合中使用均值滤波稳定ArUco二维码的3D位姿
PCL计算的法线全部朝向一侧
|摘录好题与好解020|IMO 2021 P2
CMO难度平面几何之计算方法
轨迹姿态小测试
采用PCL(Point Cloud Li
多智能体系统一致性基础-8-单积分器动力学的一致性2-Consensus Leaders and the Kronecker product
CMO演示-1-Air-2-FlightTutorial2-UnattendedFlight
【初等数论】2013年西部数学竞赛-每日一题day5
多智能体系统一致性基础-10-一阶时间离散动力系统的一致性1