V
主页
浙大机器狗演示
发布人
旁边的展台是浙大的机器狗,跟他们的研究生聊了聊,挺有意思
打开封面
下载高清视频
观看高清视频
视频下载器
点云配准的ICP算法测试
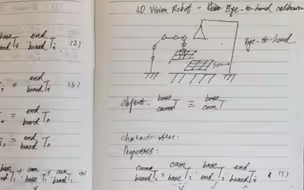
2D视觉机器人的手眼标定流程记录
斯坦德物流机器人在中国机器视觉展会的演示
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
3D视觉机器人的手眼标定流程记录
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
使用PCL(Point Cloud Library)生成点云和保存PCD点云文件
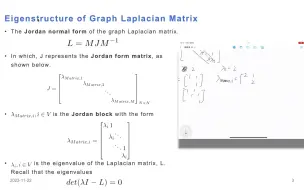
多智能体系统一致性基础-3-图矩阵基础
多智能体系统一致性基础-6-系统一致性定义
神经网络的简单讨论-简单神经元模型
3D视觉机器人中手眼标定的精度提升方法记录
分布式机器人集群的初步讨论
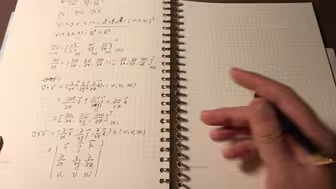
Nabla算符的理解记录
使用PCL(Point Cloud Library)进行点云的法线估计
视觉导航的ICP算法效果
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
多智能体系统一致性基础-7-单积分器动力学的一致性
遗传算法NSGA-2的基本计算流程讨论
CERN ROOT使用教程-1-CERN ROOT简单介绍
3D Sensing Robot and Random Bin Picking
多智能体系统一致性介绍-1-代数图论基础
机器人集群模拟程序-编程演示
CERN ROOT使用教程-2-CERN ROOT预编译二进制包安装
Vlog|如何过上平静的生活
手眼标定自动化的流程思考和讨论
机器人集群模拟程序-50台机器人的路径规划和实时避障演示
凸优化中一阶偏导数矩阵与二阶偏导数矩阵(海森矩阵)的定义介绍
多智能体一致性实验进度跟进-2-包含3个智能体的Perron离散时间系统一致性模拟
深度相机的性能评估
一点想法-观测与事实
机器人集群模拟程序简单演示
机器人集群模拟程序介绍-1-动机、目标、功能
机器人集群模拟程序-多机器人实时避障和路径规划演示
在轴角集合中使用均值滤波稳定ArUco二维码的3D位姿
气体污染物扩散的思考记录
2022年2月下雪
多智能体系统一致性基础-4-图矩阵基础2
阿里云服务器使用分享
回环检测在点云配准问题中的初步尝试
以分布式任务分配为目标使用三台树莓派搭建一个简易的通信框架