V
主页
多圆柱体识别,设置了5个圆柱体,随机确定
发布人
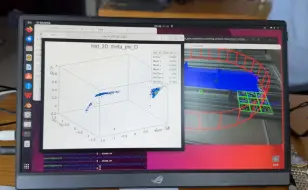
多圆柱体识别,设置了5个圆柱体,随机确定位置、朝向、半径,观测存在噪声,且噪声服从期望为0、标准差为1的高斯分布。采用圆柱拟合,配合RANSAC提升拟合算法抗噪声能力,在一个点云中实现了多物体识别。RANSAC+圆柱识别由视觉库CGAL提供,Python作图,识别和展示效果挺好
打开封面
下载高清视频
观看高清视频
视频下载器
在二维码竖直放置情况下建立圆柱体ROI
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
[SLG]皇游版扫雷,这喷的什么气体啊,身体好烫!!!
在HSV色彩空间下对三色灯的绿灯亮起状态进行识别
CERN ROOT使用教程-2-CERN ROOT预编译二进制包安装
使用3D ROI实现点云分割和加速位姿估计
排查圆柱体ROI对点云分割的BUG
点云中的多物体识别,使用CGAL库,CM
使用realsense D435识别ArUco二维码并且放一个立方体上去
多智能体系统一致性基础-2-强连接图特性讨论
70万粉了耶!
多智能体系统一致性基础-6-系统一致性定义
老电梯
点云配准的ICP算法测试
多智能体系统一致性介绍-1-代数图论基础
CERN ROOT使用教程-3-使用CMake将CERN ROOT加入C++工程中
多智能体系统一致性基础-7-单积分器动力学的一致性
多智能体一致性实验进度跟进-2-包含3个智能体的Perron离散时间系统一致性模拟
在轴角集合中使用类高斯滤波稳定ArUco二维码的3D位姿
RoBIM智能割焊机器人解决方案应用介绍
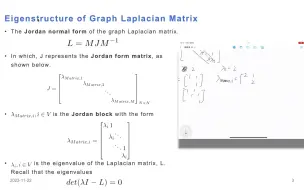
多智能体系统一致性基础-5-图矩阵基础3
使用类霍夫变换的统计方法在3D点云中进行多个平面的法线估计
这种事情,,,不要啦!!裙子下面不可以看啦!!
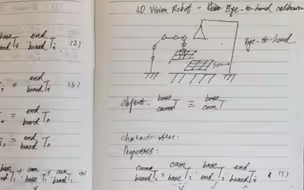
3D视觉机器人的手眼标定流程记录
分布式资源分配在机器人集群中的应用动机讨论
在类霍夫变换中使用类DBSCAN进行多个平面的提取
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
一想到我一会儿要干嘛就想笑
多智能体系统一致性基础-3-图矩阵基础
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-方法1-问题构造
多智能体系统一致性基础-4-图矩阵基础2
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
在轴角集合中使用均值滤波稳定ArUco二维码的3D位姿
依靠3D的ROI对场景点云进行筛选
今天也辛苦了,奖励自己看点甜的~
喜提一只猫德满分高颜值小猫
船舶海工行业数智化焊割装备解决方案
使用3D相机对定位精度指标进行自动数据采集和评估
多智能体系统一致性基础-8-单积分器动力学的一致性2-Consensus Leaders and the Kronecker product