V
主页
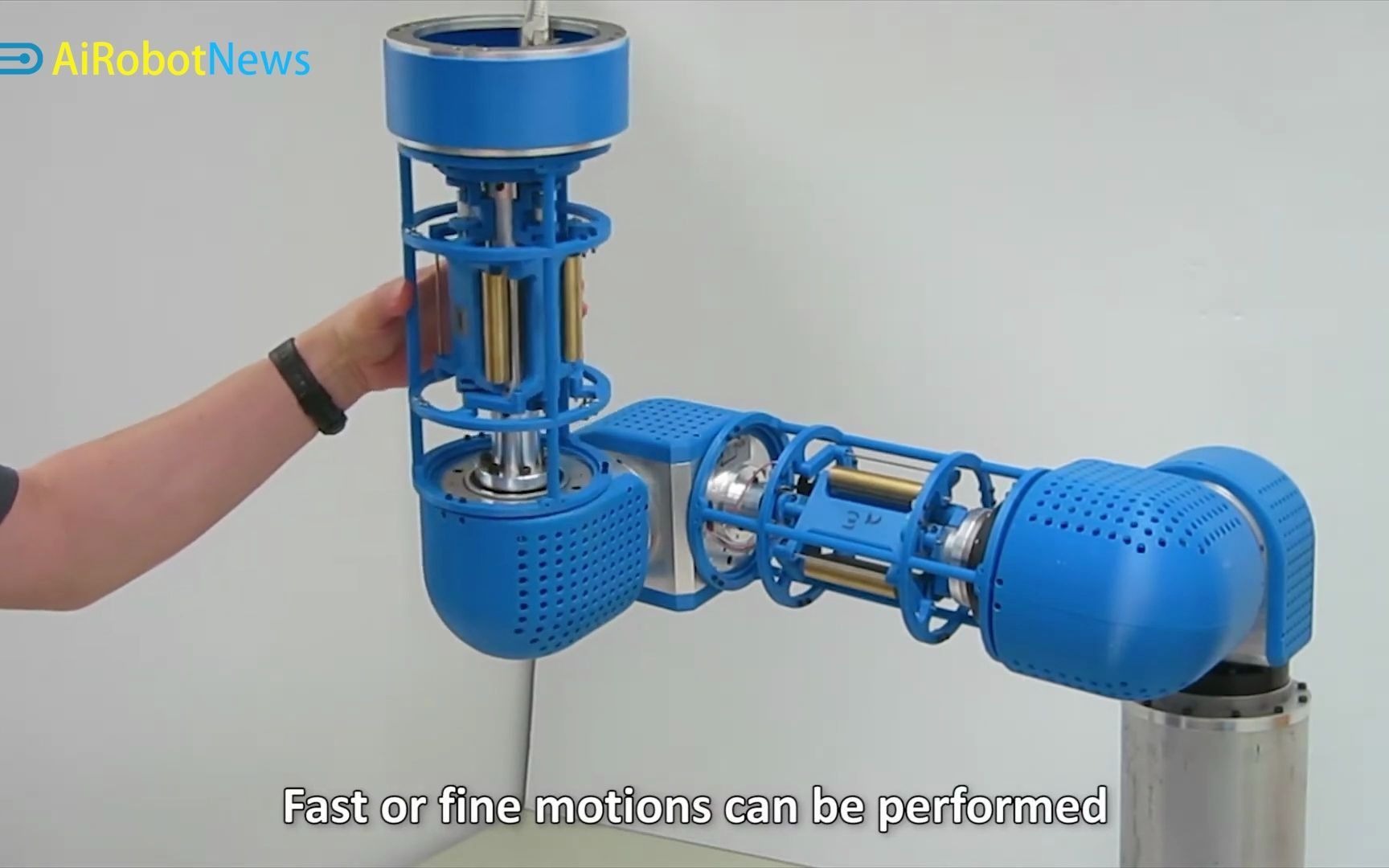
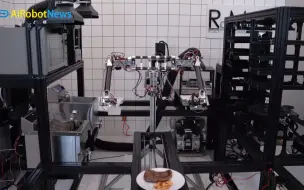
用于机械臂人机交互的低阻抗位移传感器
发布人
https://robot.gmc.ulaval.ca/en/home/?no_cache=1 该视频演示了人类用户与配备两个安装在连杆上的 3 自由度被动传感外壳的 5 自由度机器人之间的物理交互。 没有用到力/扭矩传感器。被动外壳的运动使用编码器进行测量,并用于引导机器人的运动。 可以观察到,机器人对用户的输入动作反应非常直观,交互阻抗和力非常低。 人和机器人之间的物理交互与机器人的结构分离,产生高响应性并允许人类用户部署自己的阻抗。 相关论文资料:www.airobotbbs.com
打开封面
下载高清视频
观看高清视频
视频下载器
像蛇一样灵活的机械臂--探索者蛇臂机器人
小型侦察机器人XT
这才叫巡线机器人
高速五连杆SCARA机械臂
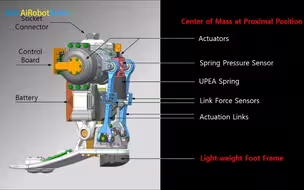
采用线性弹性执行器实现无栓单腿跳跃(LEAP)
一种无法破坏可自愈的,柔性机器人自愈材料
多工段连续线驱动的机器人手臂
麻省理工模块化机器人
最快的五杆并联机器人DexTAR
机甲骨骼机械手
多余的三维机械臂-我的第三只手
Cubli 一个可以跳跃、平衡和行走的立方体
Vicarious手术机器人
一种带有超声波推进的静音无人机
第一款由人造肌肉执行器提供动力--并实现受控飞行的微型机器人
开源类人机器人平台Reachy
一种新型同轴无人机
用于手术系统的连续体机器人
气动人造肌肉机械臂
DSTR四腿悬挂机器人系统
通过肌腱驱动的机械手-可实现在姿势和扭矩空间抓取的优化
哈佛大学受剪纸启发开发的一种像蛇皮肤一样的机器人皮肤
自主番茄收获机器人
用于太空探索的跳跃机器人Space Bok
能够在空中快速变形的四轴飞行器--加州大学伯克利分校
PID控制乒乓球杂耍机器人
雪铁龙自主移动平台
由 AI 人工智能 runway 制作的AI艺术时装秀
自足式2自由度机械脚踝
自平衡杆-双轴反作用轮倒立摆
FESTO全向多功能机械爪
AI与运动传感器使全息影像化身实时同步--舞蹈
识音辩物-通过声音来预测物体的外观及运动
机器人烹饪方法YORI
3D打印Scara机械臂测试
及其富有科技感的--桌面级旋转倒立摆2
制作一个全比例-霹雳5号机器人
五轴机械臂同时控制三个球杂耍 I
单球平衡机器人:Ballbot
OC Robotics公司蛇臂机器人II