V
主页
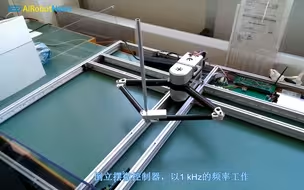
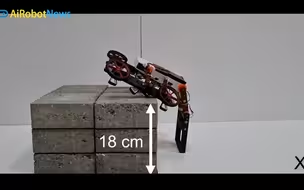
采用线性弹性执行器实现无栓单腿跳跃(LEAP)
发布人
当前和以前的单腿跳跃机器人在动力上受限制,并且缺乏便携性。在这里,我们介绍了一种不受束缚,充满活力的自主单腿跳跃机器人的设计和控制。机器人腿的推力产生机构是一个被驱动的棱柱形关节,称为平行线性弹性致动器(LEAP)。LEAP机制包括与两个压缩弹簧并联的音圈致动器,使我们的机器人具有被动适应性。
打开封面
下载高清视频
观看高清视频
视频下载器
最快的五杆并联机器人DexTAR
来来来活动活动筋骨,宇树人形机器人新技能 #宇树机器人跳跃 #人形机器人新技术 #实探2024世界机器人大会 #北京世界机器人大会现场
第一款由人造肌肉执行器提供动力--并实现受控飞行的微型机器人
一种新型同轴无人机
AIKO蛇形机器人-障碍物辅助运动和非线性系统控制
通过AI技术让图片动起来
宾夕法尼亚SMORES-EP模块化机器人
靠动量轮保持平衡的自行车机器人
寻找太空中的生命迹象的自主机器人
雪铁龙未来概念自主电动移动平台
机器人?还有一次性工作?
机器人与植物的共生体Elowan
一种新型的飞行模块化机器人结构ModQuad
高速五连杆SCARA机械臂
多工段连续线驱动的机器人手臂
用于机械臂人机交互的低阻抗位移传感器
画个圈圈ZU咒一下新冠---四线拉丝图画机器人
可跳跃、交流和协同工作的蚂蚁机器人
Care-O-bot 4家用社交机器人
新型SCARA并联机器人-具有完全圆柱形的工作空间
机器人科幻短片之《鉄人28号》
两轮平衡机器人
新型的波浪状爬行机器人
麻省理工模块化机器人
用于太空探索的跳跃机器人Space Bok
平行SCARA机械臂平衡倒立摆
五轴机械臂同时控制三个球杂耍 I
真假机器人,傻傻的分不清楚
新型的可重构机器人Tail STAR
平衡球控制台
日产送菜机器人E4ORCE
MicroMouse迷宫求解算法
ASC.NTO两轮跳跃机器人
顶个球啊--基于机器视觉的球对球平衡控制系统
IROBOT之机器人觉醒
用于手术系统的连续体机器人
带机翼的--具有地面飞行效应的叶片式履带式机器人
一种带有超声波推进的静音无人机
VicariousSurgical(替代外科手术)机器人系统
最优化的多肢垂直攀登机器人