V
主页
能够在空中快速变形的四轴飞行器--加州大学伯克利分校
发布人
加州大学伯克利分校提出了一种新的四轴飞行器设计,使用被动旋转关节,使快速空中变形,而不使用额外的驱动器。四轴飞行器的正常手臂之间刚性连接和中央的身体被铰链取代,能够允许四轴飞行器的手臂迅速的向下折叠,螺旋桨产生的推力减少时,飞行器是的尺寸变成大约原来的50%。飞行器在飞行过程中缩小尺寸的能力,能够使飞行器 穿越例如非变形四轴飞行器无法通过的缝隙。
打开封面
下载高清视频
观看高清视频
视频下载器
最快的五杆并联机器人DexTAR
自平衡杆-双轴反作用轮倒立摆
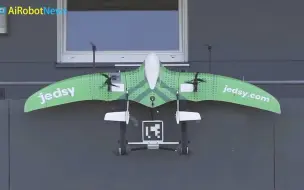
可在窗户中降落的送货无人机
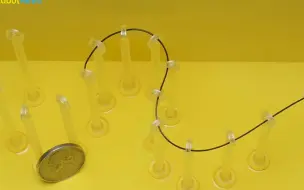
用于机械臂人机交互的低阻抗位移传感器
六自由度运动平台
麻省理工模块化机器人
苏黎世大学和洛桑职业学院 研发了一种 可以在飞行中改变形态的无人机,以适应不同的环境
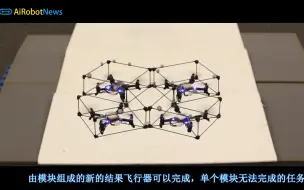
一种新型的飞行模块化机器人结构ModQuad
双球平衡机器人
VicariousSurgical(替代外科手术)机器人系统
能够为你折叠衣服的智能衣橱 Laundroid机器人
加州理工学院研发了一种名叫LEONARDO(莱昂纳多迈)的的带腿无人机
一种新型同轴无人机
自主飞行采摘机器人Tevel Aerobotics
未来医疗:麻省理工开发了一种磁可操纵的条形机器人,可以游走在如迷宫般的大脑的血管中,从而快速治疗阻塞和病变
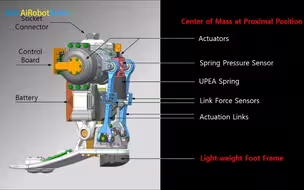
采用线性弹性执行器实现无栓单腿跳跃(LEAP)
达芬奇Vinci Sp单端口微创机器人系统
宾夕法尼亚集群阵列微型四轴飞行器
用大炮将四旋翼无人机发射出去---加州理工学院
分布式IMU系统质心估计多连杆空中机器人击球板位置
三指五自由度自适应机械手
一种带有超声波推进的静音无人机
运动纯靠“浪”---波螺旋机器人
一种可无限旋转的并行机器人
Festo-仿生雨燕Bionic Swift
Cubli 一个可以跳跃、平衡和行走的立方体
亚马逊飞艇无人机快递交付系统
生态保护机器人-SlothBot
机器人球面齿轮三自由度关节机构
应用在船、飞行器、潜水艇火星飞行器等领域的轴向磁通正反转电机
用于太空探索的跳跃机器人Space Bok
今天抛个棍-四轴无人机平衡倒立摆
自主番茄收获机器人
雪铁龙未来概念自主电动移动平台
海滩清洁机器人BeBot
一种无法破坏可自愈的,柔性机器人自愈材料
OC Robotics公司蛇臂机器人II
自足式2自由度机械脚踝
NI 六足机器人
NASA的Astrobee机器人在国际空间站实现首次自主飞行