V
主页
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
发布人
https://www.youtube.com/watch?v=rAX-rFSKAto 本工作提出了一个框架来学习工业对象的任务相关抓取,而无需耗时的实际数据收集或手动注释。为了实现这一点,整个框架仅在模拟中进行训练,包括带合成标签生成的监督训练和自我监督的手-对象交互。它允许在对象实例之间建立密集的对应关系,并将任务相关的抓取转移到新实例。 项目主页:https://arxiv.org/abs/2109.09163 代码地址:https://github.com/wenbowen123/catgrasp
打开封面
下载高清视频
观看高清视频
视频下载器
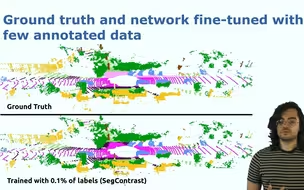
波恩大学最新开源代码!自动驾驶场景自监督三维点云表征学习,无需标注,RAL/ICRA 2022!
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
哈工大、清华联合开源GPS-Gaussian:可泛化的像素级三维高斯溅射,实时人体新视图合成
ETHZ和微软重磅开源:首个联合检测与描述线特征的深度网络!无需标注,可推广任意数据集!
最新猫女机器人
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
【开源】CVPR2022|UBC&谷歌研究光场渲染的新视图合成,可准确再现场景!解决了反射、折射和半透明等问题!
【开源】超全超新SLAM数据集!鱼眼+红外+事件+RGB+IMU+LiDAR+GNSS+RTK!上海交大研究,ICRA2022
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
【原创】上海为什么能够后来居上,成为人工智能人才的引力场?
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
即将开源!清华&北航&快手等研究DoubleField用于人体重建!CVPR2022
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
ICRA22亚马逊自动驾驶部 | Zoox自动驾驶系统的自动参数调整
122集付费!CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气全部学完!
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
深度学习三维重建学习计划
机器人【孤勇者】“总有一天,全宇宙的机器人都要高看我”
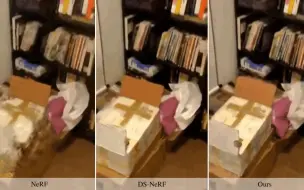
开源!CVPR 2022|TUM&谷歌研究院:基于稠密深度先验的稀疏NeRF重建
ICRA22 英特尔张益民|基于知识的自我监督持续学习-自主服务机器人之路
ICRA22大牛直播回放 | 提高深度神经网络分类器对语义转换的可信鲁棒性
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
【最新开源】TUM&谷歌等研究RGB-D表面重建,细节拉满!CVPR2022
【最新开源】CVPR2022|3D图片风格化,从单一图像生成风格化的新视图!威斯康星大学+Snap研究院发布
【开源】太酷了!相机前转一圈,人体模型就有了!天津大学&清华等新研究,CVPR2022
1.2 如何快速学习开源代码?
清华最新开源:植被地形下轮式机器人的自主导航(附PPT!)
【直播回放】SLAM常见面试问题浅析
挖掘机技术哪家强?ETHZ即将开源自主施工挖掘机!ICRA 2022
ICRA22 CMU机器人所讲座 | 面向长期自主性的MetaSLAM
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
CMU最近研究:大尺度地图自动合并,无需GPS和初始化!可用于地下采矿和城市测绘
ICRA22 VPR开创者讲座 | 从基础研究到应用迁移,视觉位置识别和定位的经验教训
UCL博士分享:神经隐式表征在SLAM中的应用(附PPT!)
Iphone 12+AR Kit面部捕捉,实时驱动机器人!表情真实,细节拉满!
头秃不怕!手绘涂鸦生成逼真发型!港城大等提出SketchHairSalon方法!即将开源
好神奇,一键即可变笑脸!面部、眼睛、嘴和头发均可任意改变!最新开源!