V
主页
ICRA22 CMU机器人所讲座 | 面向长期自主性的MetaSLAM
发布人
https://xls.xet.tech/s/z2yon 报告人:Sebastian Scherer & Max Yin Sebastian Scherer是卡内基梅隆大学机器人研究所(CMU Robotics Institute)的副教授和AirLab实验室的主任。他曾获Siebel学者称号,也是AIAA@Infotech最佳论文亚军奖(2010)的获得者。2019年,他带领CMU的团队获得了DARPA地下挑战赛的第一名,2020年获得第二名。 Peng Yin, 卡内基梅隆大学机器人研究所项目科学家。CMU DARPA SubT建模定位负责人。 报告题目:MetaSLAM:Towards long-term autonomy
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA22 CMU机器人所讲座 | 机器人自主导航开发环境
ICRA22 MIT SPARK主任 | 位置识别:鲁棒3D场景理解的挑战和机遇
ICRA22 CMU朱俊彦讲座 | 条件图像合成
ICRA22亚马逊自动驾驶部 | Zoox自动驾驶系统的自动参数调整
ICRA22大牛直播回放 | 提高深度神经网络分类器对语义转换的可信鲁棒性
ICRA22大牛直播回放 | 理解人类驾驶员对自动驾驶的交互行为
ICRA22大牛直播回放 | 如何在270公里/小时的速度下制造出可靠鲁棒的自动驾驶汽车?
【直播回放】视觉惯性SLAM系统理论与实践(下)
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
清华最新开源:植被地形下轮式机器人的自主导航(附PPT!)
【最新开源】3D美体神器来啦?秒变小蛮腰,肌肉男!来自阿里巴巴达摩院,CVPR2022
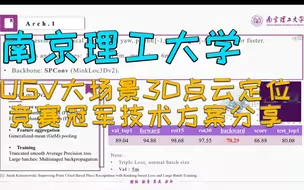
CMU & ICRA22 UGV大场景3D点云定位竞赛冠军技术方案分享|南京理工大学
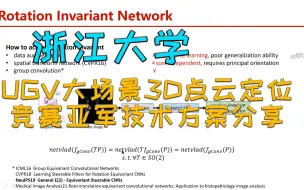
CMU & ICRA22 UGV大场景3D点云定位竞赛亚军技术方案分享|浙江大学
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
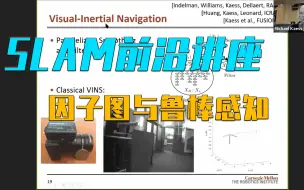
【SLAM前沿讲座】CMU|因子图与鲁棒感知
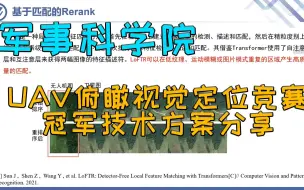
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
【开源】太酷了!相机前转一圈,人体模型就有了!天津大学&清华等新研究,CVPR2022
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
蜘蛛机器人来了,平衡力超强,竟可爬15cm的楼梯!
为什么要学习ORB-SLAM2呢?
经验分享:我的SLAM学习之路-答疑交流
【直播回放】视觉几何三维重建学习心得分享及作业讲解
CMU最近研究:大尺度地图自动合并,无需GPS和初始化!可用于地下采矿和城市测绘
即将开源!清华&北航&快手等研究DoubleField用于人体重建!CVPR2022
RGBD稠密重建开山之作-KinectFusionLib代码解析(下)
ICRA 2022盘点:SLAM方向十大重点论文解读
【最新开源】照片修复大师上线了,一键即可修复受损图片!南洋理工大学新研究,CVPR2022
【三维重建+3D点云】封神之作!计算机博士带你手把手从入门到实战,学三维重建真的不难!人工智能、计算机视觉
【直播回放】2022届秋招面试心路历程分享:SLAM方向
【直播回放】聊聊SLAM硬件、算法评估、数据集、词袋、特殊场景
机器人能从猫猫身上学到什么?
【SLAM前沿讲座】MIT|SLAM的过去、现在和未来
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(下)
CMU最新发布首个记忆增强的终身SLAM系统,源自大脑中记忆重放机制的启发!
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
【直播分享】基于动态交互表征的灵巧手物体抓取过程学习(SIGGRAPH 2022)
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
北航小姐姐带你精读SLAM综述论文