V
主页
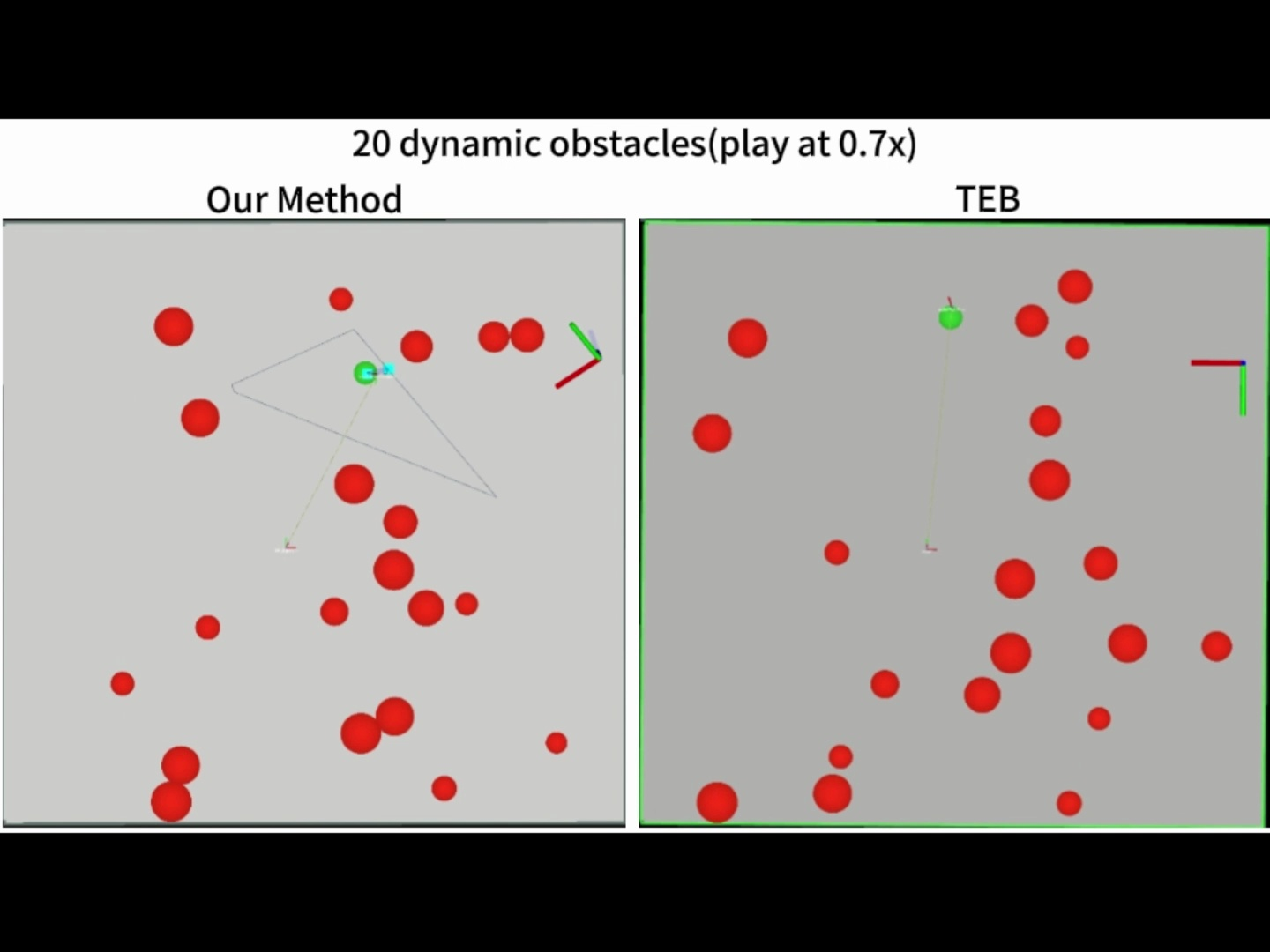
未知动态环境避障 by DRL+MPC
发布人
Collision-Free Robot Navigation in Crowded Environments using Learning based Convex Model Predictive Control Abstract: Navigating robots safely and efficiently in crowded and complex environments remains a significant challenge. However, due to the dynamic and intricate nature of these settings, planning efficient and collision-free paths for robots to track is particularly difficult. In this paper, we uniquely bridge the robot’s perception, decision-making and control processes by utilizing the convex obstacle-free region computed from 2D LiDAR data. The overall pipeline is threefold: (1) We proposes a robot navigation framework that utilizes deep reinforcement learning (DRL), conceptualizing the observation as the convex obstacle-free region, a departure from general reliance on raw sensor inputs. (2) We design the action space, derived from the intersection of the robot’s kinematic limits and the convex region, to enable efficient sampling of inherently collision-free reference points. These actions assists in guiding the robot to move towards the goal and interact with other obstacles during navigation. (3) We employ model predictive control (MPC) to track the trajectory formed by the reference points while satisfying constraints imposed by the convex obstacle-free region and the robot’s kinodynamic limits. The effectiveness of proposed improvements has been validated through two sets of ablation studies and a comparative experiment against the Timed Elastic Band (TEB), demonstrating improved navigation performance in crowded and complex environments.
打开封面
下载高清视频
观看高清视频
视频下载器
使用ROS2-Control + RL来控制四足机器人
大型纪录片《缺德地图传奇》持续为您播出
【Python】人形机器人——模型预测控制
基于MPC模型预测控制的四旋翼路径跟踪仿真设计(状态空间模型)
原来高德地图一直都在暗示我们,只是我们没有发现罢了
【DPO衍生算法串讲-Part 1】r2Q*,Step-DPO,RTO,TDPO,SimPO,ORPO
打造地表最强个人网站,博客、导航、看电影、追剧、听歌、素材管理,一站搞定!
基于优化的敏捷足式机器人控制与规划
Stanford CS234 2024 Spring | 强化学习 | Reinforcement Learning
绿波路段什么意思?最打脸车道级导航的路段是什么样子的?
进入高速隧道前导航提示前方匝道限速80跟前,很少见到啊
大型纪录片《高德暗示》持续为您播出!
【超多模型MPC算法】开源Mujoco-MPC演示
STM32 自主导航小车 S弯 航线跟踪 路径规划 MATLAB仿真
什么??我们的机器人也会看路了!!!自主导航与避障全新体验~
自制“吗喽”履带机器人果园闯关实录,昼夜不间断!
苹果16promax的导航体验是硬件问题还是软件集体罢工又或是iOS18通病?
高速公路右侧两车道是出高速很少见到,那导航都会怎么引导呢?
Lipschitz约束策略
开车用手机导航,记得打开这5个设置,能让你少走很多冤枉路
大型纪录片《高德什么都知道》为您播出!
听导航,提前规划路线
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
利用大语言模型增强机器人导航(ReMEmbR)
LeRobot的大佬Alexander Soare讲解TD-MPC(1原理部分)
为什么你应该相信导航 #高德地图 #导航
ArcGIS基础(第四节课)
外国博主晒中国北斗卫星导航精准识别汽车高速变道,外网网友直呼“神奇!”
【手搓代码】搓一套简单的自己喜欢的无人机规划控制代码
在isaaclab中开发viplanner端到端导航
【GIS】四步,批量消除面重叠与面空隙
苏-24战斗轰炸机“低空回路”操作指南
Vol.14 在烧腊店给街坊们放BEAT | PPL
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
张晚意@百度地图导航语言我不许你还不知道这个!
Svan M2: 用于机器人和人工智能研究的四足研究平台
跑后叨叨叨:“天津怎么这么多小虫子啊!!”
《ROS 2机器人开发从入门到实践》7.3.4进行单点与路点导航
第14届智能交通工具的规划、感知和导航主题workshop回顾@IROS
为什么平平无奇的路,小明还要做一期节目呢?#百度地图 #导航 #高德地图