V
主页
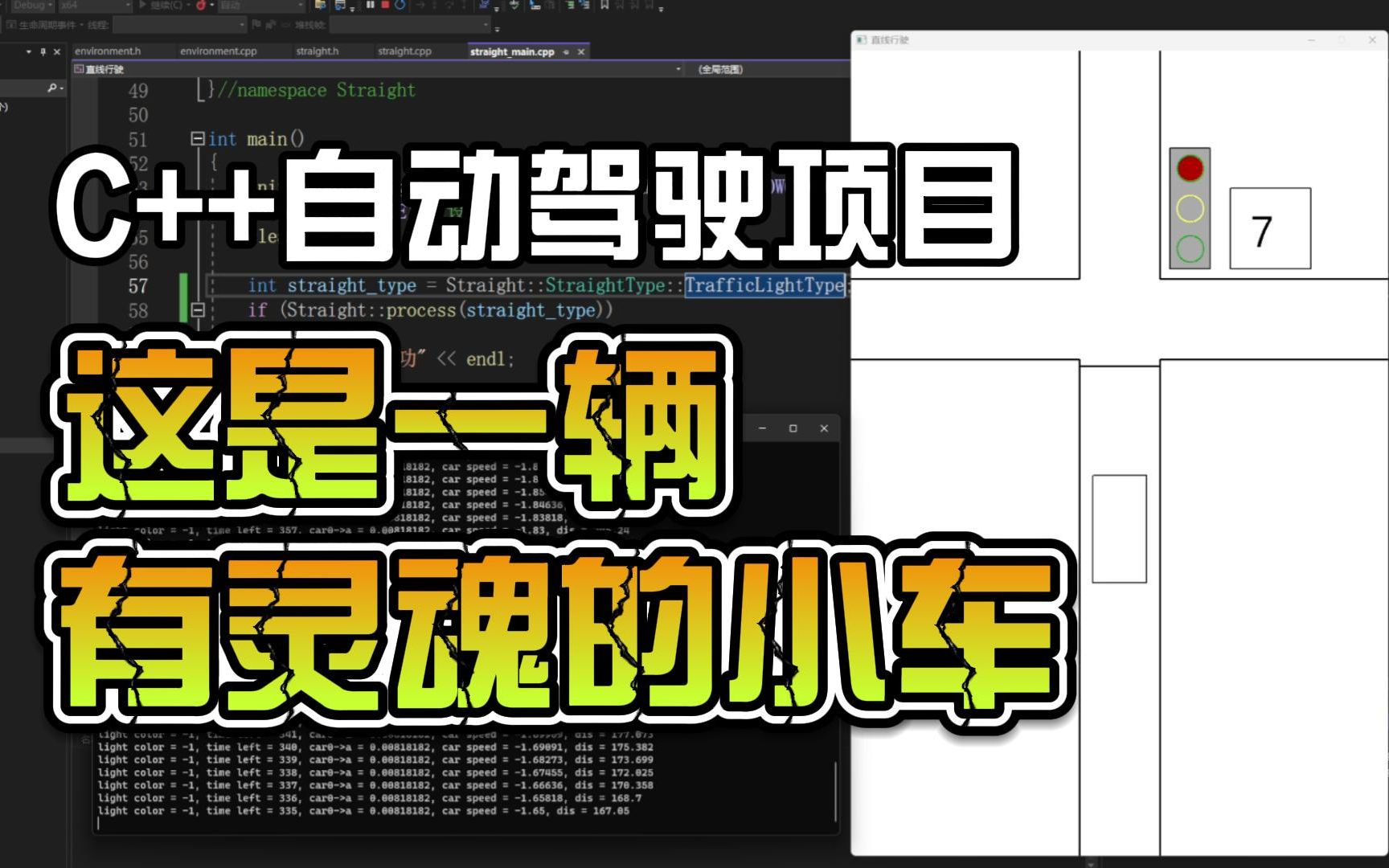
【C++自动驾驶项目】一辆有灵魂的小车(直线行驶工况合集)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶汽车预测-决策-规划-控制实战入门
【赵虚左】百度Apollo智能驾驶课程
道路化场景下的自动驾驶运动规划
华为自动泊车如何实现的?零基础带你入门自动泊车!
【中文字幕】迄今为止质量最高的无人驾驶(自动驾驶)入门课程,Udacity无人驾驶入门完整版
【Arduino】C++蓝牙小车课程(共45集)
【Apollo调试】限速通过减速带
【C++自动驾驶项目】自动泊车的6种方式,一定要看到最后
【保姆级】跟着代码学Apollo决策规划 绪论1:课程概述
OpenCV自动驾驶小车 | 从项目入手学习单片机开发 | 智能小车
【Apollo调试】红绿灯左转待转区场景
应届生月薪2W+的自动驾驶开发、机器人、后端开发,软件开发该如何学习相关技术栈
【决策规划算法】五次多项式曲线插值算法(C++)
智能驾驶C++知识点总结
C++自动驾驶行业学习路线、推荐公司、薪资水平、工作内容科普【程序员老秦】
自动驾驶如何学好C++?
关于我是如何转行成为一名自动驾驶算法工程师的
【保姆级】跟着代码学Apollo决策规划 绪论3:决策规划模块概述
C++初学者不妨试试这个项目
新晋智能车“漂移算法”
“虽然外表简陋,但我会漂移”(自动驾驶漂移算法 C++编写)
[保姆级教程](重置版)自动驾驶路径规划与控制-数据发布(上)
【决策规划算法】调头算法(C++)
【决策规划算法】自动泊车算法(C++)
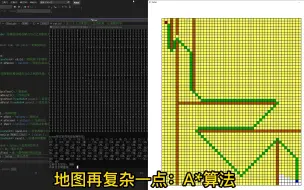
Astar算法三种类型距离效果演示
【C++自动驾驶项目】无人小车 穿梭自如
【决策规划算法】绕桩算法(C++)
花38元找一个C++老师,保证掌握C++
【保姆级】跟着代码学Apollo决策规划 Routing模块3:接口的数据结构
【决策规划算法】换道场景曲线对比与选择(C++)
【决策规划算法】漂移算法(C++)
【决策规划算法】Astar、Dijkstra、BestFS算法对比演示(C++)
【保姆级】跟着代码学Apollo决策规划 Routing模块5:拓扑地图创建主流程
【保姆级】跟着代码学Apollo决策规划 绪论2:自动驾驶行业概述
[保姆级教程] 自动驾驶路径规划与控制-数据发布(下)[带你手写一个c++文件实现控制命令的发布]
这样的科目三你见过吗
【C++无人小车场景演示】狭路相逢,我选择退让
【保姆级】跟着代码学Apollo决策规划 Routing模块1:操作演示
不是吧,学长,这个速度路径都能跑飞
【保姆级】跟着代码学Apollo决策规划 Routing模块6:平面向量的基本概念