V
主页
【Apollo调试】限速通过减速带
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
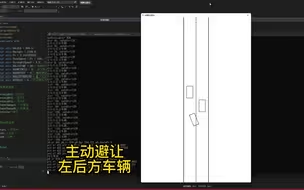
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
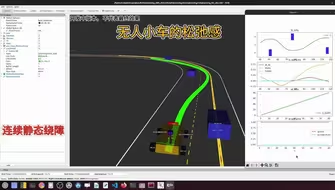
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
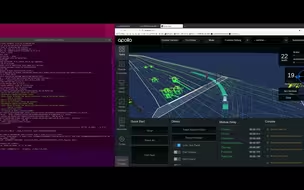
Apollo新版dreamview太好用了!
【Apollo调试】红绿灯场景调试(自动驾驶仿真)
“虽然外表简陋,但我会漂移”(自动驾驶漂移算法 C++编写)
【决策规划算法】超车与绕障(C++)
【Apollo调试】U型弯调头场景(自动驾驶仿真)
【决策规划算法】自动泊车算法(C++)
【Apollo调试】DreamView仿真测试(基于原生Ubuntu20.04)
学A星算法 这门课就够了!
【决策规划算法】人工蚁群算法(C++)
学车辆工程可以从事自动驾驶算法吗?
【决策规划算法】通过红绿灯(C++)
无人驾驶
Astar算法三种类型距离效果演示
【决策规划算法】动态规划与Dijkstra算法(C++)
【上海地铁】最快3秒启动?7条全自动驾驶线路发车效率大比拼!
【决策规划算法】无保护左转(C++)
【无人驾驶技术】特斯拉FSD自动驾驶将进入国内,这个自动驾驶系列知识课程,手把手教你如何从入门到提高—感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
【决策规划算法】调头算法(C++)
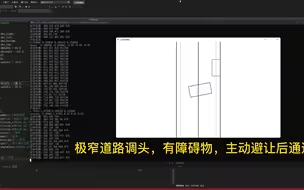
【C++自动驾驶项目】无人小车 穿梭自如
Apollo9.0仿真驾驶-靠边启动
【保姆级】跟着代码学Apollo决策规划 绪论3:决策规划模块概述
「两条无人驾驶线·同年在此站交汇」【上海地铁】铜川路站 15号线-14号线 换乘过程实录
自动驾驶算法的鄙视链
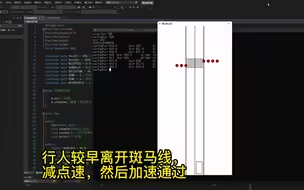
【决策规划算法】通过斑马线(C++)
【决策规划算法】B样条曲线(C++)
【保姆级】跟着代码学Apollo决策规划 Routing模块2:运行机制
这样的A*算法你会写吗?
两个萝卜同频行驶
《基于ROS2的决策规划算法工程开发》实机演示
Apollo9.0仿真驾驶-慢速车绕行
5分钟回顾极越全新端到端AI智驾发布会高光瞬间!
Apollo9.0安装bug解决 - 编译代码演示
3d驾驶游戏4.0高架警灯但是是国警
Carla+ROS2联合仿真测试,像玩极品飞车一样
【决策规划算法】Astar、Dijkstra、BestFS算法对比演示(C++)
【C++自动驾驶项目】自动泊车的6种方式,一定要看到最后
C++初学者不妨试试这个项目
CCTV报道文远知行:无人驾驶来了,你准备好了吗?