V
主页
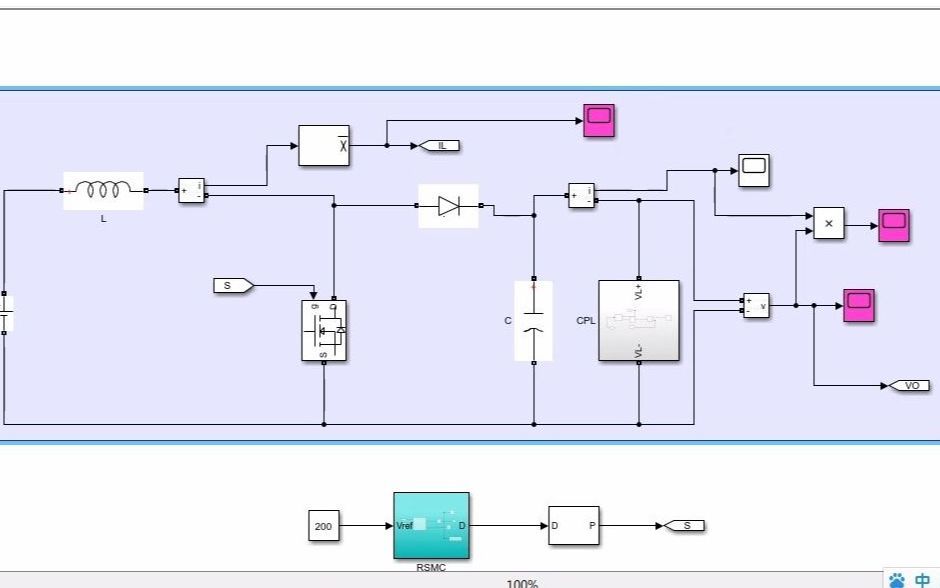
boost变换器在恒功率负载情况下的鲁棒滑模控制
发布人
Robust sliding-mode control of dc/dc boost converter feeding a constant power load
打开封面
下载高清视频
观看高清视频
视频下载器
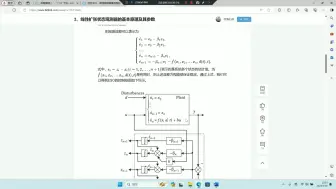
2、buck变换器的滑模控制设计
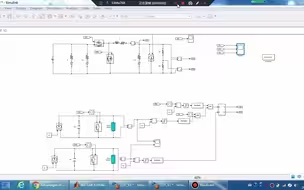
3、boost变换器在恒功率负载情况下的鲁棒滑模控制(详解篇)
8、自适应鲁棒滑模控制原理
12、四种常用高阶滑模控制器的性能比较
4、简单的鲁棒滑模控制设计
手把手教你实现Boost变换器的MPC控制
1、滑模控制的基本原理
5、滑模观测器的基本原理(从龙伯格到滑模)
10、通用线性滑模控制器的设计
11、数模混合电路实现Buck变换器的线性滑模控制(Simplis实现)
基于LQR理论的PID参数整定
9、滑模控制常见的抖振抑制方法
6、基于滑模观测器的滑模控制算法在buck变换器中的电流跟踪控制应用
储能变流器中双向DCDC的平滑充放电控制
基于内模控制的PID参数整定
A Fixed-Frequency PWM Based Quasi-Sliding-Mode Controller for Buck Converters
1、Simulink中PID工具在PID控制器参数设计的应用
自适应神经网络+滑模控制_水面舰船轨迹跟踪程序(IEEE文献)
Simplis搭建双有源桥(DAB)的闭环控制及其扫频分析(全网独家)
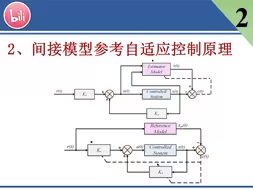
2、间接模型参考自适应控制的基本原理(包含外部扰动情况控制分析)
线性时不变系统的滑模观测器原理及参数设计
7、离散滑模控制的基本原理及仿真实现
1、扰动观测器的基本原理(频域篇)(Disturbance Observer)
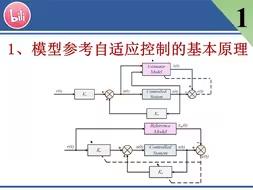
1、模型参考自适应控制的基本原理(直接模型参考自适应控制与间接模型参考自适应控制的比较)
4、非线性扰动观测器的基本原理
内模控制(Internal Model Control, IMC)的基本原理
2、基于Ziegler-Nichols方法的PID参数整定(实用干货)
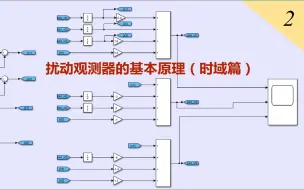
2、扰动观测器的基本原理(时域篇)
Constant on time control (COT)恒定导通时间控制浅谈及simulink实现
5、线性扩张状态观测器的稳定性分析方法
机械臂自适应反演滑模控制(非线性干扰观测器)Matlab仿真
1.反步法的基本原理及其应用设计
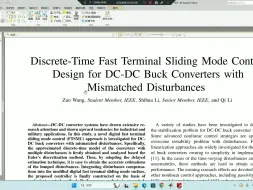
Discrete-Time Fast Terminal Sliding Mode Control Design for DC–DC Buck Converter
buck电路电压控制器的设计
基于虚拟纹波注入的ACOT控制(DCAP2)
3、线性扩张状态观测器的基本原理及其参数设计
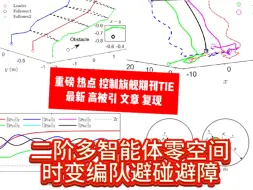
零空间非线性多智能体固定时间时变避碰编队滑模控制
手把手教你搭建simulink滞回比较器
Systems Dynamics and Control_ Module 2 - Introduction to Modeling【建模介绍】(中英双字幕)
Stability and Eigenvalues [稳定性与特征根](中英双字幕)