V
主页
一、SLAM多模态融合理论基础
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【线下讲座】苏赟:地面机器人多模态融合SLAM
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
【直播回放】SLAM公司汇总
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
学习SLAM,必读哪些基础书籍?
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
北理工小姐姐视觉SLAM学习经验分享
2021年度盘点:十大最佳开源SLAM算法!
SLAM的优秀开源方案有哪些?
【直播回放】一位学姐的SLAM科研经历和秋招经验分享!
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
【六哥答疑】入门视觉SLAM,需要了解什么框架?
【原创】初学者如何入门计算机视觉?思维导图一条龙路线规划,保姆级教程!
2022年度盘点:十大最佳SLAM开源算法
【直播回放】武汉大学开源SLAM详解!低成本轮式机器人定位算法 Wheel-INS
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
【即将开源】DM-VIO:仅单个相机和IMU优于双目惯性方法!RA-L
【直播回放】SLAM常见面试问题浅析
这个数据集真强!地下隧道、不同照明等情况下,多机器人视觉SLAM!MIT等最新开源!
效率提高24%,突破功率受限!机器人的室内高效三维探索!宾夕法尼亚大学最新发布
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
【3D数学】认识欧拉角
【六哥答疑】多传感器融合SLAM如何开始研究呢?有哪些研究方向?
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
【直播回放】视觉惯性SLAM系统理论与实践(上)
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
如何快速入门三维重建?应用场景、岗位要求及薪资、技术框架
【六哥答疑】工业相机做SLAM有什么优缺点呢?
开源!伦敦大学学院丨物体级语义SLAM :DSP-SLAM,3DV 2021
CMU最新发布首个记忆增强的终身SLAM系统,源自大脑中记忆重放机制的启发!
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
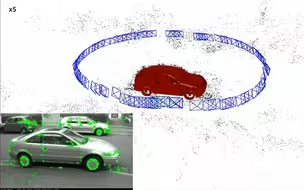
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
第24讲:解决Ego在仿真中不能运行的问题
SLAM面试答疑:什么样的项目拿得出手?小厂SLAM行情如何?
【原创】优秀开源代码盘点:半稠密视觉SLAM
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
【直播回放】近期SLAM论文速览!干货满满!