V
主页
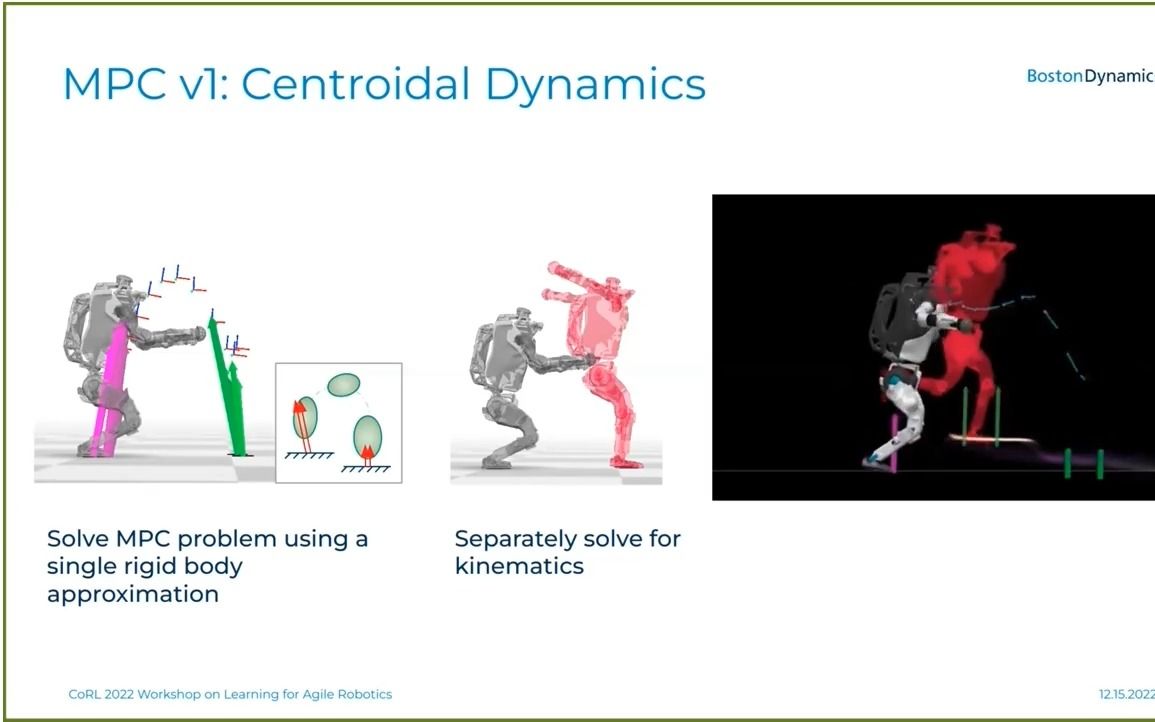
【极致MPC】哈佛教授Scott在CoRL上分享的波士顿动力双足机器人的控制算法
发布人
这里Scott详细阐述了模型预测控制是如何用在双足机器人的控制中的,其演示的视频中还有一些最新的进展。原视频很长,我剪辑了其中一部分,原视频地址:https://www.youtube.com/watch?v=LzmQTf4ODKI&t=348s
打开封面
下载高清视频
观看高清视频
视频下载器
波士顿动力 MPC 控制策略的演进与思考
【合集】波士顿动力机器人的40年进化史(1983-2023)
双足机器人角色的设计与控制
宇树科技的竞争对手 | 中国深圳机器人公司 | 逐际动力 | 融资超2亿元 | 开发3款机器人产品 | 了解逐际动力 怎能错过这个视频 | 云深处科技
用MPC保证双足机器人站立站不住,不知道哪里出的问题,求教各位大佬
双足机器人ZMP预观控制的仿真过程
美女被催眠控制控制,变得乖巧听话
双足机器人Digit:拒绝成为打工人
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
一款设计巧妙的六轮足机器人,皮实耐用且越野性能强大!可用于侦查,救援和探险等各种复杂场景。#轮足机器人 #波士顿动力
【中英字幕】波士顿动力公司创始人Marc Raibert WRC2024 问答剪辑
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
桌面人形机器人 步距突破500毫米走6步 最大步距可以到90毫米 3D打印双足机器人
采样YINYIN的歌做个BEAT|MPC中文教学
双足跳跃
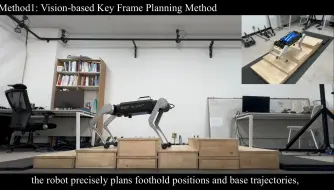
四足运动:用三种不同的方法在崎岖地形上行走
在俄乌战场大放异彩的机器狗!
Consensus Complementarity Control for Multi-Contact MPC
LIPM biped walking simulation on CoppeliaSim
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
非结构化环境中腿式机器人的地形相关功率估计
人形机器人腿部结构 基于 4DoF 球面并联机构
图睿双足人形机器人 | 销售电话18268017403
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
特斯拉机器人再进化,打工人上线。
宇宙有地外文明吗?科学家:银河系就有36个,颠覆你认知的算法
CMU卡耐基梅隆机械工程研究生用Bittle做的一些二次开发
波士顿动力最新电动机器人视频
李飞飞团队重磅开源ReKep:万能具身机器人!实时交互,还可搭载GPT-4o!
『青灵TV』控制32(外星球)
不是,你不要这么稳啊,我算法还没写完~
人形机器人现场鲁棒性测试
【人形机器人】在Gazebo/Mujoco中的仿真
来自挪威的家用人形机器人 NEO | 全球 最安全 最像人类的 机器人 | 它可以进入家庭 成为人类的保姆 | 人形机器人 | 智能机器人 | 人工智能
CoppeliaSim仿真倒立摆受外力推动后恢复自平衡
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
韩国媒体关注中国无人机器狗,韩国网民:机器狗的起源是韩国现代波士顿动力
美少女大战异常收容物? 遗失物管辖机构(一)
宇树科技人形机器人 G1 | 强大的运动能力 电驱全球第一 | 美国波士顿动力 你还不出招 | Atlas | S1| 星尘智能 | 智能机器人 | 人工智能
2024世界机器人大会现场,开上“高达”了~