V
主页
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
发布人
https://www.youtube.com/watch?v=J4pqAU7O8Ew Multi-Contact Inertial Estimation and Localization in Legged Robots Sergi Martinez, Robert Griffin, and Carlos Mastalli Under-review, 2024. Abstract—Optimal estimation is a promising tool for multi-contact inertial estimation and localization. To harness its advantages in robotics, it is crucial to solve these large and challenging optimization problems efficiently. To tackle this, we (i) develop a multiple-shooting solver that exploits both temporal and parametric structures through a parametrized Riccati recursion. Additionally, we (ii) propose an inertial local manifold that ensures its full physical consistency. It also enhances convergence compared to the singularity-free log-Cholesky approach. To handle its singularities, we (iii) introduce a nullspace approach in our optimal estimation solver. We (iv) finally develop the analytical derivatives of contact dynamics for both inertial parametrizations. Our framework can successfully solve estimation problems for complex maneuvers such as brachiation in humanoids. We demonstrate its numerical capabilities across various robotics tasks and its benefits in experimental trials with the Go1 robot. Index Terms—optimal estimation, inertial parameters, smooth manifolds, localization, and legged robots. 0:00 Introduction to multi-contact optimal estimation 0:28 Multiple shooting solvers enable estimation in agile maneuvers 0:41 Ensuring full physical consistency of inertial parameters through smooth manifolds 0:58 Nullspace parametrization handles singularities in the inertial-parametrization derivatives 1:10 Our optimal estimation framework handles a wide range of robotics problems 2:03 Conclusion Music by Vincent Rubinetti
打开封面
下载高清视频
观看高清视频
视频下载器
同济 熊溪:基于强化学习与大语言模型的智能网联交通系统决策优化「OR Talk #32」
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
万元内机械臂开动!!!
MuJoCo 仿真 案例欣赏
电液肌肉单腿机器人 灵活的腿 轻巧的腿
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
Tuning Legged Locomotion Controllers via Safe Bayesian Optimization
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
How to design nonlinear MPC with deep learning prediction model
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
MPC and RL, two different roads to legged locomotion, and that's OK
四足运动:用三种不同的方法在崎岖地形上行走
令人惊叹的步态和控制 无比丝滑 Boston Dynamics Spot
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
Ghost Robotics 四足机器人 专注特定领域 【狗头】
Contact-Implicit MPC: Controlling Diverse Quadruped Motions Without Pre-Planned
Learning whole-body manipulation for quadrupedal robot
人形机器人远程视觉操纵
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
Scaling Population-Based Reinforcement Learning with GPU Accelerated Simulation
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
移动机械臂底盘路径跟踪
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
IHMC Atlas Clearing Debris with Teleoperation
Orthrus: A Dual-arm Quadrupedal Robot for Mobile Manipulation and Entertainment
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
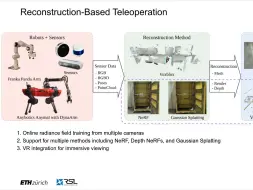
ETH | Anymal 机器人远程操作的辐射场
基于模型控制的人形机器人行走 MATLAB and Simulink
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
印度的四足机器人 看着还可以哦
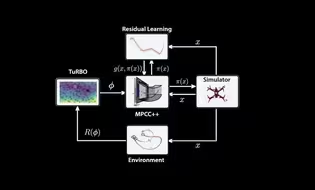
(RSS'24) MPCC++:具有安全约束的时间最优飞行的模型预测轮廓控制
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
Tailoring model complexity in MPC of legged locomotion