V
主页
非结构化环境中腿式机器人的地形相关功率估计
发布人
https://www.youtube.com/watch?v=5Sx1_3p9bOE Terrain Dependent Power Estimation for Legged Robots in Unstructured Environments Abstract Gait-based legged robots offer substantial advantages for traversing complicated, unstructured, or discontinuous terrain. Thus increasing their use in many real-world applications. However, they are also challenging to deploy due to limitations in operation time, range, and payload capabilities due to their complex locomotion and power needs. Anticipating the impact of terrain transitions on the range and average power consumption is crucial for understanding operational limits in autonomous and teleoperated missions. This study examines strategies for forecasting terrain-dependent energy costs on five unique surfaces (asphalt, concrete, grass, brush, and snow). The field experiments demonstrate the effectiveness of our combined proprioception and vision approach called MEP-VP. This hybrid framework only requires two seconds of motion data before returning actionable power estimates. Validation is conducted on physical hardware in field demonstration.
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器从六维力传感器核心标的,柯力传感基本面梳理
同济 熊溪:基于强化学习与大语言模型的智能网联交通系统决策优化「OR Talk #32」
人形机器人足底机械结构设计
波士顿动力人形机器人 Atlas | 强大的运动能力 夺回全球第一 | 宇树科技 波士顿动力回应你们了 | 机器人 | 智能机器人 | 人形机器人 |
洛杉矶警察局的机器狗在枪击事件发生后进入了房屋#机器狗应用
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
宇树科技的竞争对手 | 中国深圳机器人公司 | 逐际动力 | 融资超2亿元 | 开发3款机器人产品 | 了解逐际动力 怎能错过这个视频 | 云深处科技
2024世界机器人大会现场,开上“高达”了~
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
一款设计巧妙的六轮足机器人,皮实耐用且越野性能强大!可用于侦查,救援和探险等各种复杂场景。#轮足机器人 #波士顿动力
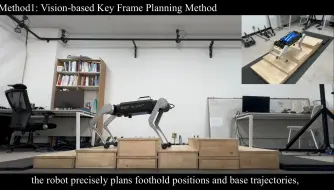
人形机器人远程视觉操纵 论文和代码在简介
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
通过优化理论指导设计双足以达到控制和任务的最优
四足运动:用三种不同的方法在崎岖地形上行走
浙江大学第二代表情机器人“小美”
浙江大学第四代表情机器人“小瑶”,这你受得了吗?
1X发布了最新一代的人形机器人NEO Beta 家用型的人形机器人
机器狗与机械臂抓取调试中
OpenAI投资的1X机器人NEO动作丝滑到让人分不出
惊呆众人!世界机器人大会现场实拍,星尘智能机器人书法表演,无与伦比的丝滑!#世界机器人大会 #星尘智能机器人 #人形机器人 #保姆机器人#国产机器人
终于玩上了!在Isaac实现unitree H1的运动仿真
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
来自挪威的家用人形机器人 NEO | 全球 最安全 最像人类的 机器人 | 它可以进入家庭 成为人类的保姆 | 人形机器人 | 智能机器人 | 人工智能
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
真牛!这个人形机器人吊打很多厂家的“产品”
人形机器人腿部结构 基于 4DoF 球面并联机构
北漂打工机器人牛马
灵巧手,进化!
双足机器人步态生成 MATLAB and Simulink
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
不错,优雅,专业!
成功跳起!复刻桌面mini轮足机器人!太可爱了!
BD Altas 感知功能 你能从中看到哪些可以学习的技术点?
智元机器人全面开源:无私奉献还是弯道超车?|这事钛大了
北京2024世界机器人大会 美女机器人
NASA’s first humanoid robot Valkyrie is being tested in Australia
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Figure 02 人形机器人
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
波士顿动力最新电动机器人视频