V
主页
排查圆柱体ROI对点云分割的BUG
发布人
使用Intel Realsense D435,对点云进行分割,分割的标准是:保留存在于感兴趣区域(ROI)内的点,去掉存在于ROI外部的点。之前的工作中,对这种分割标准的计算出现了错误,现在已经发现并改正。
打开封面
下载高清视频
观看高清视频
视频下载器
在二维码竖直放置情况下建立圆柱体ROI
多圆柱体识别,设置了5个圆柱体,随机确定
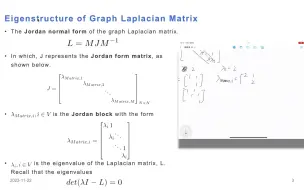
多智能体系统一致性介绍-1-代数图论基础
简易版机器人集群任务分配模拟平台
CERN ROOT使用教程-2-CERN ROOT预编译二进制包安装
多智能体系统一致性基础-6-系统一致性定义
依靠3D的ROI对场景点云进行筛选
多智能体系统一致性基础-4-图矩阵基础2
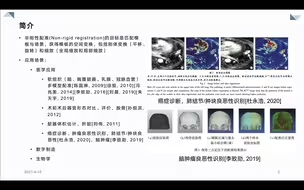
3D点云非刚性配准(Non-rigid Registration)的简要介绍
3D Sensing Robot and Random Bin Picking
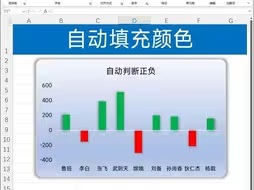
让柱形图,根据数据正负自动判断颜色,简单又好用
机器人集群模拟程序介绍-1-动机、目标、功能
一点想法-观测与事实
FILTER通配符提取数据
Graphpad prism绘图,数据差异过大如何做Y轴截断
多智能体系统一致性基础-8-单积分器动力学的一致性2-Consensus Leaders and the Kronecker product
小型室内机器人调度系统介绍-1-背景和目标
阿里云服务器使用分享
小型室内机器人调度系统介绍-4-程序实现方法和简单测试程序
多智能体系统一致性基础-2-强连接图特性讨论
Shielding Board Allocation to Protect Robots from Radiation Damages
城市灾难救援下的预算与设备分配
小型室内机器人调度系统介绍-3-数学方法和应用场景
TeXShop操作流程记录
机器人集群模拟程序开发-阶段性闲聊-2022年9月
Pascal的腌笃鲜
完全免费的手机万能格式转换器,支持18种格式转换!视频格式转换,音频格式转换,图片格式转换,统统无限次使用,
手把手教你CNC加工中心编程与实践
机器人集群模拟结果的Blender可视化显示
使用统计方法在3D点云中进行多平面的识别和位姿估计
静态特征结构光相机的3D定位方法简介
机器人集群模拟软件演示-机器人之间的防碰撞功能
Unity的错误令人暖心,多年未被解决的bug,究竟是程序的扭曲还是字符的沦丧
多智能体一致性实验进度跟进-1-本机多智能体通信框架搭建完成
小型室内机器人调度系统介绍-5-第二版程序实现方法
9、基于长短期记忆网络LSTM的多输出回归预测以及预测新数据-matlab程序详细讲解
Excel查找数据,明细自动跳转高亮显示🔥
手机数据恢复软件,up主自用,免费无广白嫖可用,直接一键恢复手机误删图片、视频、音频、文档等等
机器人集群模拟程序-50台机器人的路径规划和实时避障演示
[Pas' Cooking]1月的果仁烤饼