V
主页
用于动态抓取的鹰爪仿生变形四旋翼机 | 2024 上海交通大学
发布人
https://ieeexplore.ieee.org/document/10495172 摘要:本文介绍了一种新颖的仿生变形四旋翼机设计,灵感来自鹰爪捕猎时的形态。四旋翼机的臂能够垂直折叠,实现动态抓取,模仿鹰爪从张开到闭合的过渡状态。该过渡通过中央伺服电机的旋转及其带动的20个连杆运动来实现。得益于框架的闭环多连杆结构,当臂折叠时,四旋翼机的螺旋桨保持在固定的方向,使系统在任何臂旋转角度下都能保持稳定。分析整个框架的几何特性,以确定连杆的关系和约束,这对于实验性飞行器的制造非常重要。为了应对抓取过程中可能的物理特性变化和外部干扰,采用了自适应滑模控制器。为了在抓取任务中处理未知尺寸的物体,提出了一种自适应形态的容许滤波器。在飞行中,我们提出的变形四旋翼机能够在其范围内快速或连续平滑地过渡到任何配置。实验结果显示,四旋翼机能够以0.4米每秒的速度动态抓取各种未知物体,无需额外工具,并且在穿越狭窄空间和停留方面表现出多功能性。 论文:M. Xu, Q. De, D. Yu, A. Hu, Z. Liu and H. Wang, "Biomimetic Morphing Quadrotor Inspired by Eagle Claw for Dynamic Grasping," in IEEE Transactions on Robotics, vol. 40, pp. 2513-2528, 2024, doi: 10.1109/TRO.2024.3386616.
打开封面
下载高清视频
观看高清视频
视频下载器
用于模块化机器人组装结构的分散算法 | 宾夕法尼亚大学
能够在半空中从组合四旋翼机中分离的模块化双旋翼机 | 北京航空航天大学
模块化四旋翼飞行器快速空中重构的设计与控制,具有完全可控的自由度 | 2024 电子科技大学
生物启发的 可变形螺旋桨 降低人机交互的风险 | 2023 塞维利亚大学
模块化组合四旋翼无人机群的偏航控制 | 宾夕法尼亚大学
揭秘机械手定位抓取原理,让你一秒变专家!!! 《机械手定位抓取》
无人机和无人车自动对接和分离 | 2023 北京航空航天大学
由单个推进单元组成的可重构空中机器人:飞行实验 | 苏黎世联邦理工学院
使用被动动态生物启发抓手进行栖息和抓取 | 国立首尔大学
[Nature]甲虫和扑翼微型机器人的被动翅膀展开与收拢 | 2024 洛桑联邦理工学院
通过被动变形实现扑翼机的最优弹性翼 | 2023 塞维利亚大学
装配异构模块来增加组合无人机的有效载荷和自由度 | 里海大学
由单个推进单元组成的可重构空中机器人 | 苏黎世联邦理工学院
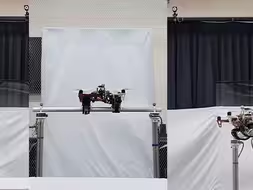
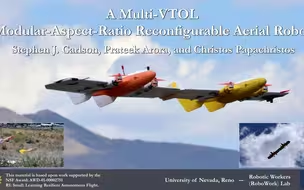
由垂直起降无人机组成的模块化可重构空中机器人 | 内华达大学
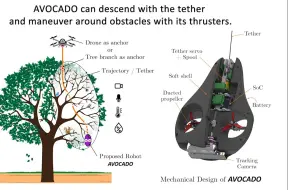
一种用于树冠探索的多模态空中系留机器人 | 2023 苏黎世联邦理工学院
可组合式无人机,能应用在哪?
不懂就问,小机器人的体量真的很小吗?
可重构空中机器人链 | 内华达大学
反重力飞碟 阿列克谢反重力飞行器 #反重力 #UFO #反重力飞行器
全网炸裂!NEO机器人原型曝光,网友惊呼:这货不是机器人,是人!
Edge540
可重构的空中机器人链 | 内华达大学
2024中国大学生飞行器设计创新大赛西部赛区选拔赛成功举办!
受液滴表面张力启发的可变刚度变形轮|2024 Science Robotics【韩国科学技术大学】
史上最强市售Honda RC213V 陆地飞行器
永不着陆! 西工大又一黑科技亮相 ,彻底打破美国神话!
百公里消耗一个左摇杆(
由单个推进单元组成的可重构空中机器人:实物实验 | 苏黎世联邦理工学院
海康 Visionmaster视觉软件与西门子1200PLC 联合运动 引导抓取
模块化组合四旋翼无人机群的偏航控制论文介绍 | 宾夕法尼亚大学
Adam:首款高仿生人形机器人的硬件架构设计
许多人都曾在天空中发现过不明飞行物,从飞行器到类似流星物体,毫无疑问这种“外星体”是存在的
[Nature]自然光即可实现持续飞行的静电飞行器 | 北京航空航天大学
40 种你不知道的独特飞行器
自制手机无线充电机器人零食柜
激光辅助的介电弹性体致动器在空中机器人中的故障恢复 | 2023 麻省理工学院
新型高超音速飞行器,能反复“打水漂”,这种能力最好用不上
盘点那些有趣的桌面机械臂1
浙江大学第二代表情机器人“小美”
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位