V
主页
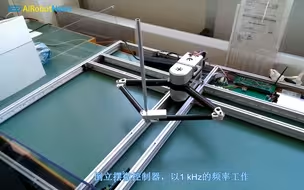
运动纯靠“浪”---波螺旋机器人
发布人
在最近的一项研究中,以色列研究人员开发了一种具有最小驱动的波浪形机器人,并对其运动学进行了分析。研究人员提出了一个微型波机器人的动态运动分析。研究了不同的爬行环境,确定在什么条件下它可以前进,并评估它的推进力。研究人员首先开发了两个运动模型来描述机器人在两个直线表面之间或在一个平面上爬行的情况。指定了机器人前进的条件和前进时间比作为机器人摩擦力和重量的函数。
打开封面
下载高清视频
观看高清视频
视频下载器
六自由度运动平台
机器人双眼结构
用于手术系统的连续体机器人
MicroMouse迷宫求解算法
Care-O-bot 4家用社交机器人
IROBOT之机器人觉醒
通过AI技术让图片动起来
机器人混合运动:利用轮式结合式机器人在各种地形上的优势
附身入替美女
Vicarious手术机器人
让你心动的美女和机器人
平行SCARA机械臂平衡倒立摆
SoftFoot Pro新型仿生假肢
机器人球面齿轮三自由度关节机构
两轮平衡机器人
宇树科技四足机器人Go1仿真(Gazebo下建图导航)
极度舒适-强迫症必看-ABB机器人-挑选和包装意大利香肠snacks
最快的五杆并联机器人DexTAR
在轮毂上控制球平衡系统
一种新型同轴无人机
大眼社交机器人Haru
DelFly agile一种受昆虫启发的飞行机器人
颠个球先-并联机器人
Tiago Pro协同机器人
Snapbot可配置腿式机器人
机器人电影系列之芬奇
鹰状神经网络具有最先进的稳定功能
ArtieMax绘画机器人
3D打印软体机器人
机器人科幻电影之《Finch》
可以远程VR控制的Model-T机器人
世界上唯一具有逆运动学和正运动学的六自由度六足并联机器人六翼机器人Hexapteron
密歇根工程学院的机器人实验室
卖的不是冰淇淋卖的是人生啊---机器人科幻短片BiBo
六杆球形张拉整体机器人
机器人科幻短片之《DRONE》第二集
教育机器人RVR by Sphero2
用于机械臂人机交互的低阻抗位移传感器
剪式成对控制力矩陀螺仪倒立摆
安卓机器视觉机器人