V
主页
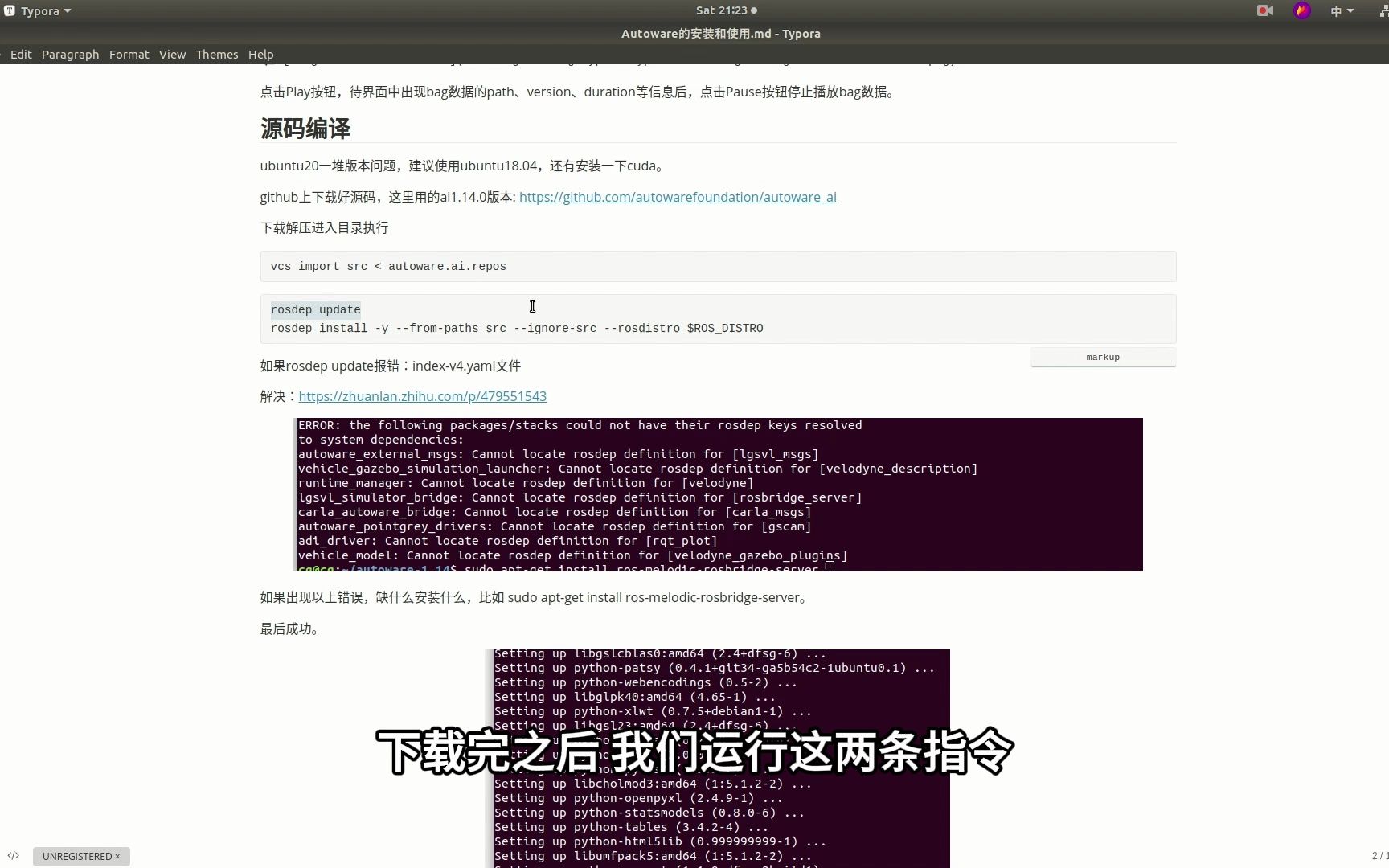
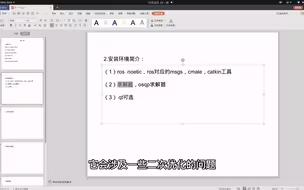
autoware的实战使用系列-源码安装
发布人
autoware的安装与carla联合仿真教程,学习自动驾驶路径规划入门必备的实战经验,和项目学习,可用来设计毕业设计,课程设计,写入面试简历
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
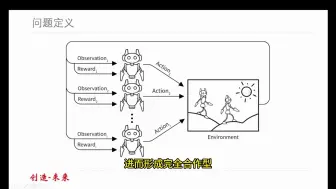
自动驾驶决策规划论文专题交流(二):Motion Planning for Autonomous Driving
自动驾驶路径规划-控制决策入门学习-变道规划算法效果演示
自动驾驶路径规划-Lanelet教程
孙少军与小伙伴谈:长安深蓝S07华为乾崑智驾,百度Apollo萝卜快跑舆情
自动驾驶规划控制算法工程更新简介
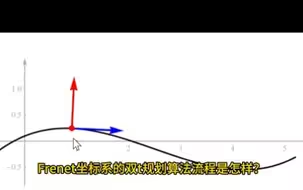
Frenet坐标系双t规划算法的代码原理讲解(一)
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划ros-carla联合仿真使用
自动驾驶路径规划算法入门-autoware的实战使用
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶路径规划-控制决策入门学习
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
ROS-Carla泊车停车场联合仿真过程步骤讲解
自动驾驶路径规划算法入门-autoware的实战使用
重磅推出ros2版本自动驾驶决策规划算法移植工程
自动驾驶强化学习决策规划carla实战-ddqn算法
11.11直播回放-DWA算法基本思想分享
自动驾驶路径规划-控制决策入门学习
自动驾驶深度强化学习-前言课
自动驾驶决策规划ros-carla泊车停车场联合仿真实战(一)
10.28直播回放:入门简单搭建自动驾驶规划场景思路和经典的Frenet规划讲解
自动驾驶路径规划实车工程参数简介
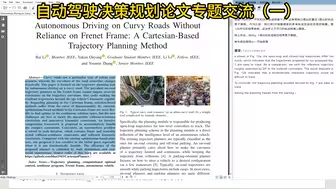
自动驾驶决策规划论文专题交流(一)
自动驾驶路径规划入门-JOSM的使用
路径规划|更平滑的Theta*算法(ROS C++/Python/Matlab)
自动驾驶路径规划ros移植-Autoware.ai-carla联合仿真
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
自动驾驶多智能体深度强化学习-入门知识
Frenet坐标系双t规划算法的代码原理讲解(二)
apollo路径规划ros移植--dl-iaps优化算法的演示
自动驾驶路径规划与控制-pure pursuit/PID/stanley控制实现
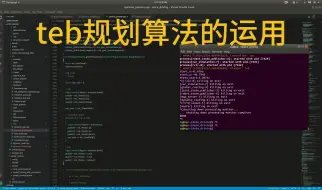
自动驾驶规划算法入门实战学习-teb规划算法的应用
自动驾驶路径规划-控制决策入门学习
自动驾驶深度强化学习-HighwayEnv安装使用
自动驾驶路径规划ros移植-Autoware.ai-carla联合仿真
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
深度强化学习算法carla平台实战-PPO算法
自动驾驶路径规划-控制决策入门学习