V
主页
Ubuntu系统下的PX4纯软件在环联合仿真
发布人
实现功能: 1)在Ubuntu系统下使用PX4纯软件在环联合仿真来模拟飞行器的行为; 2)在QGC地面站上规划航线进行追踪及返航; 3)在Jmavsim虚拟仿真器上给定操控指令实现起飞、降落、解锁等功能。
打开封面
下载高清视频
观看高清视频
视频下载器
WSL下的PX4-QGC-AirSim的虚拟可视化仿真
WSL下的PX4与无人机Simulink模型在环仿真的完整演示
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
基于PX4固件利用空速计来测空速的演示
基于Simulink的PX4飞控算法的开发实践(2.硬件在环示例模型1演示)
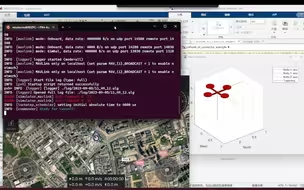
WSL下利用QGC操作PX4-Gazebo仿真器完整演示
WSL下的PX4软件和UAV动力学模型在环仿真工作流
处理器在环(PIL)的代码生成及有效性验证(一)
PX4飞控基于惯性传感器数据和Simulink模型的控制器在线开发
基于Simulink的PX4飞控算法的开发实践(6.传感器硬件在环)
使用 Pixhawk2.1Cube 实飞自己的控制器算法效果
基于MBD的四旋翼PID控制器调参效果实际演示
基于Simulink的PX4飞控算法的开发实践(7.遥控器硬件在环)
基于Simulink的PX4飞控算法的开发实践(3.硬件在环示例模型1演示继续)
【开源无人机】零基础首飞一架开源无人机
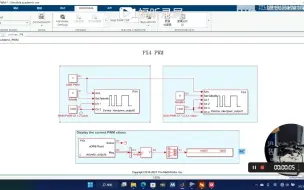
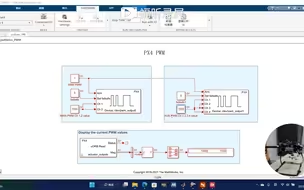
基于Simulink的PX4飞控算法的开发实践(4.硬件在环示例PWM模型2演示)
PX4飞控的模型在环、软件在环和硬件在环的区别
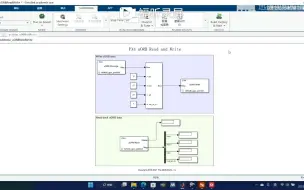
基于PX4的Simulink模型实时获取GPS导航数据
【开源无人船】从零调试一艘开源无人船
雷迅新品7-nano飞控开箱测评
【开源无人机】舵机控制教学
基于Simulink的PX4飞控算法的开发实践(5.PWM模块无法驱动电机转动的解决方法)
【开源无人机】Ego_Planner程序控制飞行
新款7-nano飞控飞共轴无人机
7-nano飞控与共轴反桨无人机
【开源无人机】从零调试一架开源无人机
【开源无人船】从零组装一艘开源ROS无人船
【开源无人机】4G模块及远程连接使用教程
Flightgear-Simulink联合仿真及自定义配置机型机场的演示
电调电机校准操作演示
【开源无人机】Vins_fusion代码讲解
Pixhawk系列硬件飞控刷写Bootload引导程序的操作
#雷迅创新#CUAV#太阳能飞机7.5小时续航测试
第24讲:解决Ego在仿真中不能运行的问题
四旋翼反步法控制仿真模型演示
【自制】论文实验|项目验收|仿真竞赛|算法验证不可或缺的无人机仿真平台
第16讲:使用Gazebo位姿真值|模拟动捕系统
无人机Simscape建模(二)-航迹规划及位姿控制梳理
新品!SKYE 2 智能空速计,新升级,全面防水保护!
无人机Simscape建模(一)