V
主页
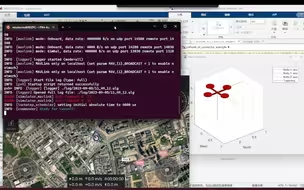
WSL下的PX4-QGC-AirSim的虚拟可视化仿真
发布人
有关PX4无人机联合AirSim搭建环境的网站链接及配置操作我整理了个word文件,链接如下可自取: 链接:https://pan.baidu.com/s/1xYrlzwRoZOjqin-buke_pw 提取码:rez7
打开封面
下载高清视频
观看高清视频
视频下载器
WSL下利用QGC操作PX4-Gazebo仿真器完整演示
Ubuntu系统下的PX4纯软件在环联合仿真
WSL下的PX4与无人机Simulink模型在环仿真的完整演示
WSL下的PX4软件和UAV动力学模型在环仿真工作流
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
基于Simulink的PX4飞控算法的开发实践(1.硬件支持包配置)
PX4飞控的模型在环、软件在环和硬件在环的区别
基于Simulink的PX4飞控算法的开发实践(2.硬件在环示例模型1演示)
基于PX4固件利用空速计来测空速的演示
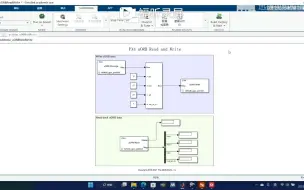
基于Simulink的PX4飞控算法的开发实践(6.传感器硬件在环)
基于Simulink的PX4飞控算法的开发实践(7.遥控器硬件在环)
基于Simulink的PX4飞控算法的开发实践(3.硬件在环示例模型1演示继续)
PX4飞控基于惯性传感器数据和Simulink模型的控制器在线开发
Flightgear-Simulink联合仿真及自定义配置机型机场的演示
利用Python-Flightgear实现自主飞行任务可视化
基于MBD的四旋翼PID控制器调参效果实际演示
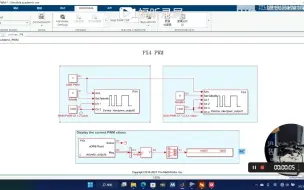
基于Simulink的PX4飞控算法的开发实践(4.硬件在环示例PWM模型2演示)
【开源无人车】从零组装一辆开源PIX无人车
使用 Pixhawk2.1Cube 实飞自己的控制器算法效果
四旋翼反步法控制仿真模型演示
wsl2安装和使用
处理器在环(PIL)的代码生成及有效性验证(一)
【开源无人机】从零组装一架开源无人机M0-F250
在虚幻引擎Unreal中体验操控机器人
【开源无人机】从零调试一架开源无人机M0-F250
含有反步法+PID双控制器及风速干扰模型的无人机定点定高控制全系统Simulink模型
基于PX4的Simulink模型实时获取GPS导航数据
基于Simulink的PX4飞控算法的开发实践(5.PWM模块无法驱动电机转动的解决方法)
Pixhawk系列硬件飞控刷写Bootload引导程序的操作
【开源无人车】从零调试一辆PIX无人车
触觉智能RK3588工控主板性能到底有多逆天
Simulink模型与Python脚本之间数据通信的实现
【开源无人机】move_base自主导航参数详解
7.2无人机PID参数调试
固定翼飞机非线性模型线性化步骤及分析(二)
RocketPy
【开源无人机】ROS基础开发教程-Hello,World!示例
史上最详细UbuntuServer分区,标准分区和lvm逻辑卷两种分区方案,看懂记得点赞!
工程实践中的根轨迹分析与设计
【开源无人机】S2-F290无人机自主飞行,俯视监控,全方位精准避障