V
主页
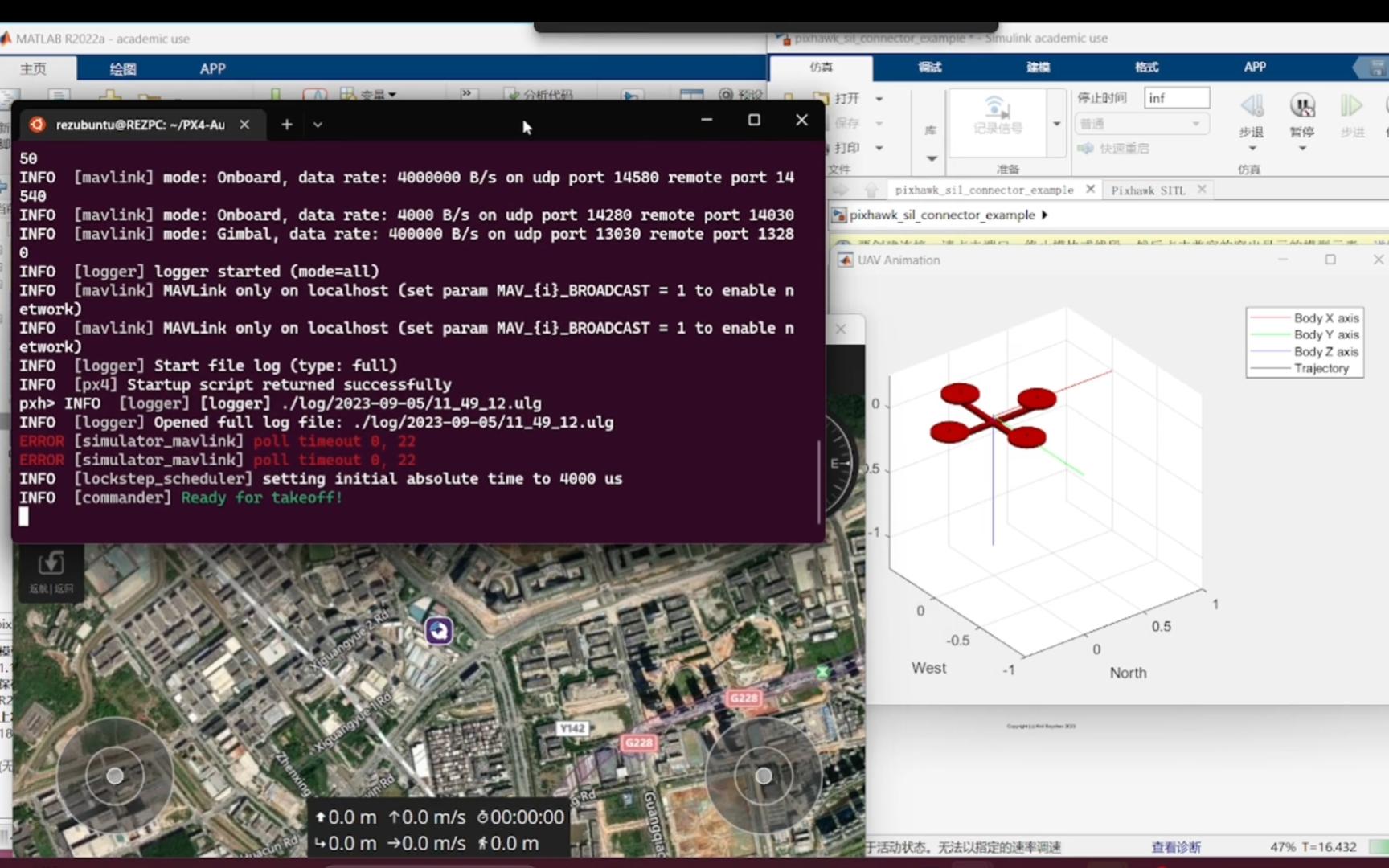
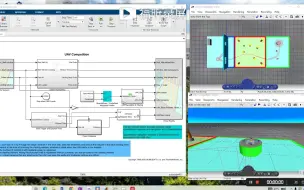
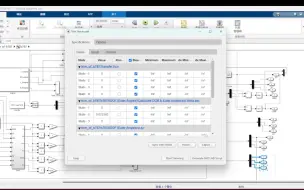
WSL下的PX4软件和UAV动力学模型在环仿真工作流
发布人
本视频走通了在Windows系统下的Linux子系统克隆PX4源码构建PX4软件飞控环境,实现了与Simulink模型中的UAV模型的数据通讯与连接并在Ubuntu终端可以实时控制无人机动态响应,最后也是可以将PX4软件系统通过UDP方式与QGC地面站连接,从而在QGC进行遥控和航迹规划任务等。 视频中的总结的word文档链接:https://pan.baidu.com/s/1BHNIURHrAB9h6mW1mdIK7Q 提取码:rez7
打开封面
下载高清视频
观看高清视频
视频下载器
PX4飞控的模型在环、软件在环和硬件在环的区别
WSL下的PX4与无人机Simulink模型在环仿真的完整演示
WSL下的PX4-QGC-AirSim的虚拟可视化仿真
基于Simulink的PX4飞控算法的开发实践(1.硬件支持包配置)
WSL下利用QGC操作PX4-Gazebo仿真器完整演示
Ubuntu系统下的PX4纯软件在环联合仿真
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
基于MBD的四旋翼PID控制器调参效果实际演示
为啥做AI非得装个ubuntu系统
新手小白从零开始搭建一个自己的WordPress博客网站
基于Simulink的PX4飞控算法的开发实践(2.硬件在环示例模型1演示)
基于PX4固件利用空速计来测空速的演示
四旋翼反步法控制仿真模型演示
基于Simulink的PX4飞控算法的开发实践(6.传感器硬件在环)
处理器在环(PIL)的代码生成及有效性验证(一)
【教程】用Termux搭建桌面级生产力环境
固定翼飞机非线性模型线性化步骤及分析(一)
基于Simulink的PX4飞控算法的开发实践(3.硬件在环示例模型1演示继续)
PX4飞控基于惯性传感器数据和Simulink模型的控制器在线开发
震惊一大学生竟然在宿舍做出来……基于阿尔法Linux嵌入式开发板+阿里云+小程序的共享电单车的设计和实现
[闲聊] Ubuntu 24.04 使用体验
Hyprland 安装与配置,让Ubuntu 24.04 拥有酷炫视觉效果和流畅的操作
基于Simulink的PX4飞控算法的开发实践(7.遥控器硬件在环)
基于ROS、Gazebo和PX4的无人机空中对接
HyprLand 让你的 Ubuntu 24.04 桌面看起来既现代又酷
【第9讲】Petalinux开发操作!!!Vivado & Petalinux之间关系配置!!!WSL子系统自定义开发Petalinux!!!
UAV虚拟碰撞传感器的交互式控制仿真
固定翼飞机非线性模型线性化步骤及分析(二)
【2024版kali Linux】奇安信大佬手把手带你入门网络安全渗透技术,7天成为脚本小子,非相关专业也能学的黑客教程!
Linux入门 | 真实服务器环境演示Linux命令行操作
含有反步法+PID双控制器及风速干扰模型的无人机定点定高控制全系统Simulink模型
Linux三剑客超全超详情教程(grep、sed、awk入门到精通有这一套足够了)
Flightgear-Simulink联合仿真及自定义配置机型机场的演示
使用 Pixhawk2.1Cube 实飞自己的控制器算法效果
飞控 PX4 简介,无人机开发实践 - 第 3 期 RISC-V Linux 系统开发公开课
这能拿国奖吗?兄弟们
ssh连接工具
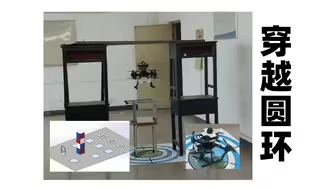
无人机Simscape建模(二)-航迹规划及位姿控制梳理
一个时代的结束:CentOS已于6月30日退出历史舞台。
【大佬秘籍】子牙老师告诉你,如何才能学会任何计算机技术,看懂任何代码:Java虚拟机、linux内核、redis、MySQL