V
主页
无人机Simscape建模(一)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
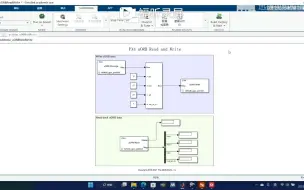
无人机Simscape建模(二)-具体的simscape组件建模过程
无人机Simscape建模(二)-航迹规划及位姿控制梳理
WSL下的PX4与无人机Simulink模型在环仿真的完整演示
从零开始制作四旋翼无人机 EP0 - 项目整体思路介绍
四旋翼反步法控制仿真模型演示
基于MBD的四旋翼PID控制器调参效果实际演示
基于Simulink的PX4飞控算法的开发实践(6.传感器硬件在环)
含有反步法+PID双控制器及风速干扰模型的无人机定点定高控制全系统Simulink模型
ansys fluent大风车瞬态CFD——6DOF动网格+被动转动+全世界原创
固定翼飞机非线性模型线性化步骤及分析(一)
固定翼飞机机翼设计及气动特性分析
Peter尝试载人四旋翼
固定翼飞机非线性模型线性化步骤及分析(二)
利用Python-Flightgear实现自主飞行任务可视化
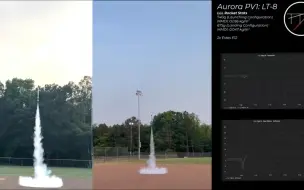
RocketPy
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
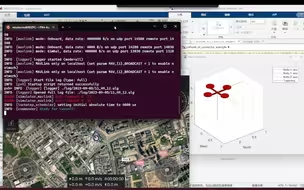
WSL下的PX4-QGC-AirSim的虚拟可视化仿真
啊?啊!解放军罕见画面首次公开
歼-20对抗隐身“敌机”画面曝光! 网友:这都能播?!
基于Simulink的PX4飞控算法的开发实践(1.硬件支持包配置)
工程实践中的根轨迹分析与设计
基于Simulink的PX4飞控算法的开发实践(3.硬件在环示例模型1演示继续)
Pixhawk系列硬件飞控刷写Bootload引导程序的操作
Ubuntu系统下的PX4纯软件在环联合仿真
和我一起来听听飞行器de控制
基于Simulink的PX4飞控算法的开发实践(2.硬件在环示例模型1演示)
TTB自己制造的火箭回收着陆模型演示
飞控算法测试过程集合
PX4飞控的模型在环、软件在环和硬件在环的区别
Simulink模型与Python脚本之间数据通信的实现
Paragliding Explained (一)
BGD团队在美国飞行
WSL下的PX4软件和UAV动力学模型在环仿真工作流
汽车所有零部件的工作原理
无人机组完成测试任务
使用 Pixhawk2.1Cube 实飞自己的控制器算法效果
可以展示!福建舰弹射系统测试首次公开
Flightgear-Simulink联合仿真及自定义配置机型机场的演示
黑神话悟空VR 6dof “棍绑手中 随心而动”
基于Simulink的PX4飞控算法的开发实践(7.遥控器硬件在环)