V
主页
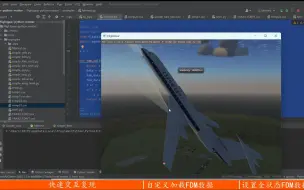
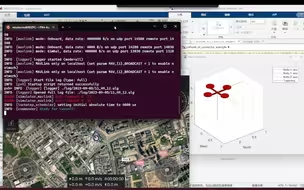
Flightgear-Simulink联合仿真及自定义配置机型机场的演示
发布人
本视频以MATLAB上的一个HL20航天器模型示例演示了飞行器模型与Simulink的联合仿真及操作说明了如何更换不同的飞机模型、跑道场景等,希望这个视频可以对你的入门有所帮助。
打开封面
下载高清视频
观看高清视频
视频下载器
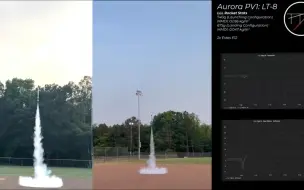
TTB自己制造的火箭回收着陆模型演示
利用Python-Flightgear实现自主飞行任务可视化
WSL下的PX4与无人机Simulink模型在环仿真的完整演示
电调电机校准操作演示
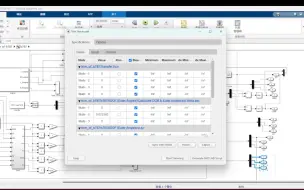
固定翼飞机非线性模型线性化步骤及分析(二)
Ubuntu系统下的PX4纯软件在环联合仿真
第14届自抗扰控制线上交流会议
第14届自抗扰控制线上交流会议(2)
WSL下的PX4-QGC-AirSim的虚拟可视化仿真
【代码生成定制】模型生成VxWorks风格的代码
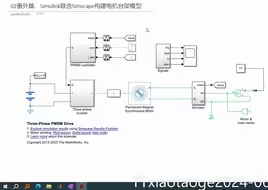
从0开始学习电机控制—02番外篇:Simulink联合Simscape构建电机台架模型
MATLAB-Simulink典型环节设计
Paragliding Explained (一)
WSL下利用QGC操作PX4-Gazebo仿真器完整演示
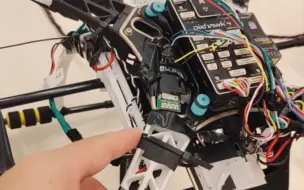
IO-PWM-OUT 接线
Peter尝试载人四旋翼
基于PX4固件利用空速计来测空速的演示
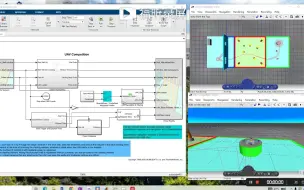
UAV虚拟碰撞传感器的交互式控制仿真
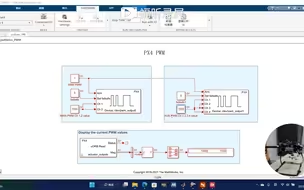
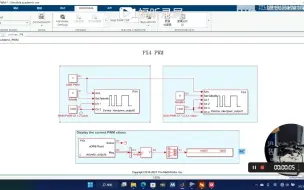
基于Simulink的PX4飞控算法的开发实践(4.硬件在环示例PWM模型2演示)
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
基于Simulink的PX4飞控算法的开发实践(7.遥控器硬件在环)
Simulink模型与Python脚本之间数据通信的实现
WSL下的PX4软件和UAV动力学模型在环仿真工作流
《高阶会员专属-第50期》IEEE论文导读:如何使用Simulink与LabVIEW自行建立硬体在线回路(HIL)系统
和我一起来听听飞行器de控制
The essential guide of paragliding at the coast (二)
飞控电机顺序测试记录
基于Simulink的PX4飞控算法的开发实践(3.硬件在环示例模型1演示继续)
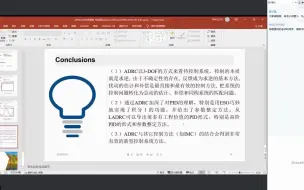
处理器在环(PIL)的代码生成及有效性验证(一)
【降阶建模ROM】P1: 降阶建模 ROM 的应用与方法
滑翔伞初学者应牢记
实现动态甜甜圈效果竟然只有不到60行代码
从太空视角看地表火箭发射,我们太渺小了
基于Simulink的PX4飞控算法的开发实践(5.PWM模块无法驱动电机转动的解决方法)
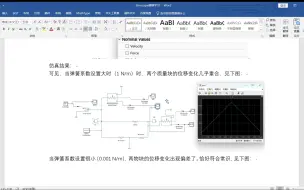
异步电机变频恒压频比调速闭环控制(位置/速度双闭环)MATLAB/Simulink
Breeze2滑翔伞装备开箱,太解压了
无人机Simscape建模(一)
姿态控制实飞
歼20总设计师杨伟的航空故事
PX4飞控基于惯性传感器数据和Simulink模型的控制器在线开发