V
主页
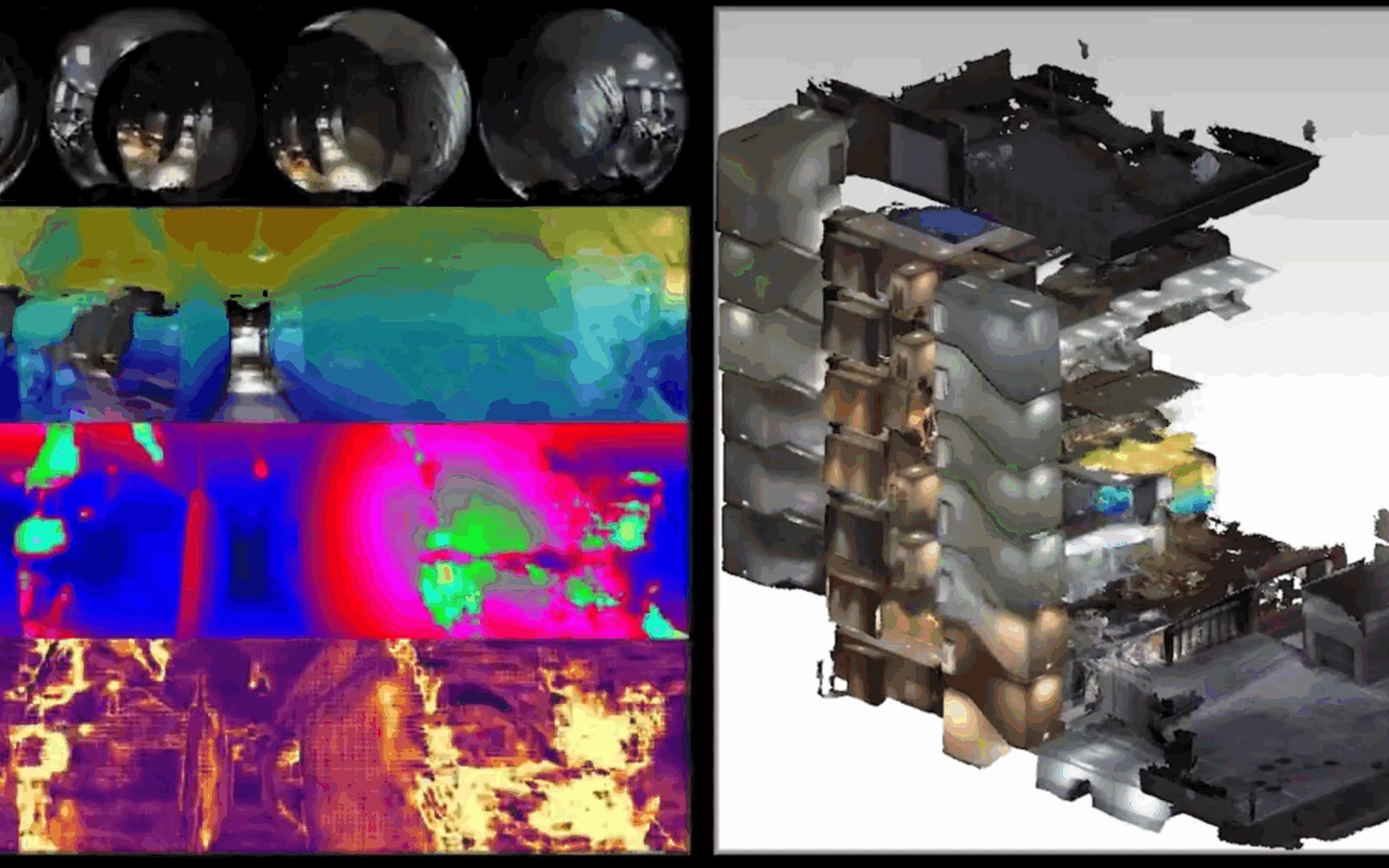
360度多层建筑定位和建图!
发布人
https://www.youtube.com/watch?v=S79z9bU35ac 全方位(360度)多层建筑定位和建图(SLAM)
打开封面
下载高清视频
观看高清视频
视频下载器
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
ROS2用slam_toolbox建图,树莓派猪脑过载
AI视频换脸真的快变态死了!!!
不剪了!!全国第一名!!#智能车
计算机视觉与SLAM的区别
双目视觉定位的六轴3D打印的机械臂(基础版本python控制)
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
激光SLAM重定位视频1
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
CMU等机构发布超强VSLAM数据集TartanAir,用于探索视觉SLAM极限!
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
【直播回放】武汉大学开源SLAM详解!低成本轮式机器人定位算法 Wheel-INS
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
SLAM初学者常问的几个问题
立体匹配算法原理与应用-奥比中光
【六哥答疑】哪些相机比较适合做SLAM?
2021年度盘点:十大最佳开源SLAM算法!
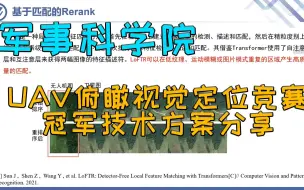
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
1.2 如何快速学习开源代码?
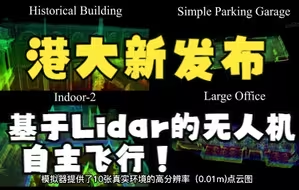
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
01-NeRF与SLAM结合的早期探索
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
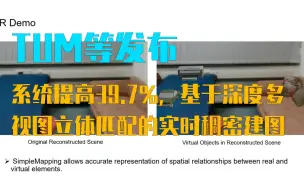
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
TUM|端到端多视图特征匹配+位姿估计,可自动忽略异常值!效果远超SuperGlue!
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
【六哥答疑】建立稠密地图的视觉SLAM,目前效果最好的开源算法有哪些?
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
【硬核课程】ORB-SLAM2重点梳理1:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
CMU最新发布首个记忆增强的终身SLAM系统,源自大脑中记忆重放机制的启发!
【最新开源】人脸编辑玩出不同花样!可改动年龄、操控表情等,太真实了!华南理工等新发布,ECCV2022
【六哥答疑】工业相机做SLAM有什么优缺点呢?
北航小姐姐带你精读SLAM综述论文
波士顿动力机器人,要成精了!
对于SLAM小白,前辈有什么推荐的学习经验?
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
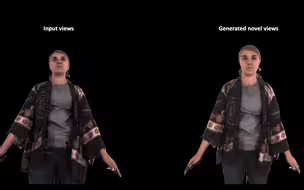
人体视图合成新方法HVS-Net!使用单视图、稀疏的RGB-D输入
为什么要学习ORB-SLAM2呢?