V
主页
前沿丨更通用的搬运方法,竟然是筷子!
发布人
https://vimeo.com/562950542 筷子的好处在于它们几乎可以夹住任何东西(即使你把筷子放大),这使得它们在形状、尺寸和重量差异很大的有限空间中特别有价值。筷子也很适合操纵,能够精确地推动和重新定位物体。 如果有一个表面平坦的、不可渗透的箱子,吸取技术就可以快速地工作,并且不需要太多花里胡哨的规划。但吸力的操作形式是有限的,因为它的吸附能力实在过强,难以执行高精度的任务。 吸力可能会是某些特定任务的好选择,但是如果他们可以让筷子发挥作用的话,筷子操作将会是更加通用的方法。
打开封面
下载高清视频
观看高清视频
视频下载器
机器生活,机器人爱上女主人,每天给女主按摩
【开源项目】5分钟教你制作一个下棋机器人
【直播回放】2023 ROS暑期学校39号直播精剪
前沿| 蓖麻油,让软体机器人获得自愈功能!
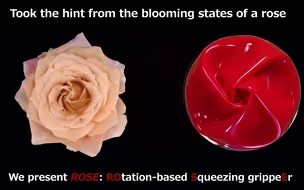
前沿|ROSE—酷似玫瑰的新型柔性抓取器
前沿|最简单的猴子摆机器人
基于深度学习的机器人平面抓取【课程试看】
前沿|这款仿生机器人将清理全球海洋垃圾
OriginBot智能小车完整安装演示
《从零开发智能四轮小车》| 智能车 | DIY | 通信协议 | 应用功能【课程试看】
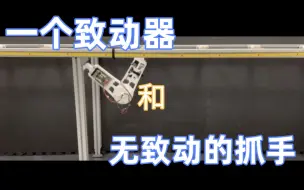
前沿|用于柔性机器人分布式控制的非线性充气执行器
OriginCar智能机器人套件完整安装视频演示
机器人帅哥出现故障
MuJoCo机器人阻抗控制仿真【课程试看】
会游泳、会抓取|米粒大小的机器人还有什么特殊功能?
前沿|爬楼、过泥坑的机器人,只有你想不到没有Ascento做不到
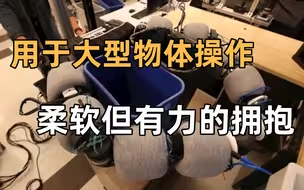
前沿| Punyo-1—可抱起大型物体的柔顺机器人
【直播回放】RDK X3 使用及学习资源分享——第十九届智能车竞赛:地平线智慧医疗智能车创意组
【直播回放】OriginBot系列直播:深度解析机器人开发
【直播回放】AI时代智能机器人开发新范式
【公开课】 古月• 第一讲《TogetherROS移动机器人应用开发流程》| 智能小车| SLAM地图构建| ROS2
前沿|长指甲的机器人—Sanctuary
用Moveit! 来玩个双臂机器人【课程试看】
前沿| 能听指令移动的围墙你见过没?
前沿|空中的“战争”—无人机自动驱赶入侵屋顶的鸽子
前沿|未来的自重构机器人
ROS二维码识别应用指南|基于ZBAR与libdmtx的二维码识别入门教程【五分钟试看】
前沿| 加利福尼亚大学研发出柔性可发光材料,探索未知环境的软体机器人福音!
【开源项目】如何构建你自己的基于 Arduino 的机器人
RoboMaster TT ROS入门级无人机开发-田博|2021ROS暑期学校 第三天精剪回放
前沿| 最快、最节能的两栖机器人—AmphiSAW
ROS基础原理与应用-胡春旭|2021ROS暑期学校 第三天直播精剪回放
前沿| 可进行自我形态的全身视觉建模机器人
前沿|无人机羽毛球——低视力人群运动的福音
前沿|没有什么可以阻止这架无人机|使用人工鞘翅实现自动矫正
【公开课】 古月• 第六讲《TogetherROS移动机器人自主导航》 | 智能小车| SLAM地图构建| ROS2
移动机器人目标检测YOLOv5【课程试看】
【直播回放】第十八届智能车竞赛之如何备赛航天智慧物流创意组
【4.TogetherROS外设通信与驱动方法】基于ROS2 | 更强的AI能力 | 开源系统
前沿| 一个姿势就能控制无人机