V
主页
【SLAM前沿讲座】多伦多大学|用于解锁视觉导航的动态相机
发布人
https://www.youtube.com/watch?v=-hxg8aLg8kk 学习教程官网:cvlife.net 1、视觉SLAM:ORB-SLAM2(必学基础) 2、视觉惯性SLAM:ORB-SLAM3,VINS-Mono、VINS-Fusion 3、激光/多传感器融合SLAM:Cartographer,LeGO-LOAM、LIO-SAM、LVI-SAM 4、三维重建:视觉几何OpenMVS,深度学习重建MVSNet、PatchMatchNet、JDACS-MS 5、机器人运动规划:Navfn、Dijkstra、A-Star、DWA、TEB 6、相机标定:单目/鱼眼/双目/阵列
打开封面
下载高清视频
观看高清视频
视频下载器
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
IMU选型、标定误差分析、AHRS组合导航
【SLAM前沿讲座】特拉华大学|视觉惯性估计与感知
1.2 如何快速学习开源代码?
立体匹配算法原理与应用-奥比中光
【SLAM前沿讲座】CMU|用于触觉感知的因子图学习
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
基于ros2-humble的lio-sam的建图自动导航仿真
【SLAM前沿讲座】生物启发SLAM:我们从哪里来,我们能去哪里?|昆士兰科技大学
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
手把手带你入门SLAM
SLAM知识星球直播答疑及抽奖
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
公开课 | 无人机实时及快速地图重建
学术大佬答疑解惑!关于语义激光SLAM,说不定有你想知道的!
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
CMU等机构发布超强VSLAM数据集TartanAir,用于探索视觉SLAM极限!
[英语] 多伦多大学大二前的夏天 VLOG #2 | Eaton商场、珍珠奶茶、uoft 多伦多大学课程规划
【SLAM前沿讲座】帝国理工学院|基于图形的空间AI表示
2022年度盘点:十大最佳SLAM开源算法
北航小姐姐带你精读SLAM综述论文
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
动态SLAM论文综述讲解(含30+论文下载)!
2021年度盘点:十大最佳开源SLAM算法!
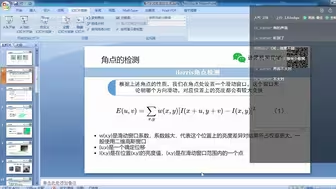
角点的提取、跟踪与筛选
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
CMU最新发布|不同环境下机器狗的360°相机定位,能自动规避障碍物,快速又准确!
我愿称之为2024年【计算机视觉与三维重建】入门天花板教程,北邮大佬用15个小时给它讲明白了,不愧是名校公开课!!!
西北工大开源DenseFusion:多无人机协同实时稠密重建方法!
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
多地图的作用和效果_7.2
学习SLAM,必读哪些基础书籍?
【原创】初学者如何入门计算机视觉?思维导图一条龙路线规划,保姆级教程!
【直播回放】机器人SLAM年度答疑手册发布
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
【原创】优秀开源代码盘点:稀疏视觉SLAM/SfM
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
【直播回放】视觉惯性SLAM系统理论与实践(下)