V
主页
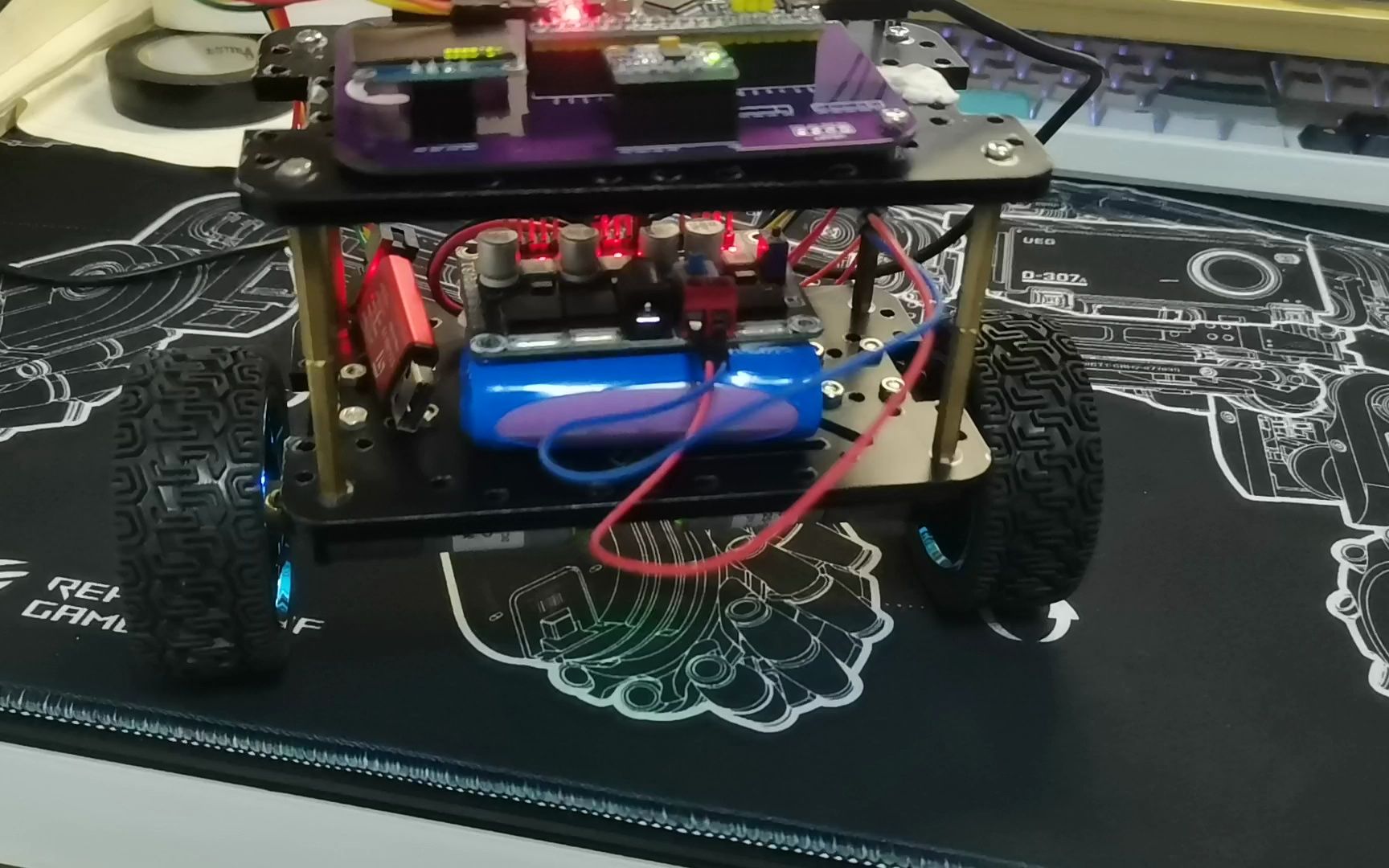
基于STM32平衡小车(PID+编码器+MPU6050+TB6612)
发布人
所有代码及PCB全部开源 链接:https://pan.baidu.com/s/1Sc7Dvk_EKXP73qSf7FSY1g 提取码:1234
打开封面
下载高清视频
观看高清视频
视频下载器
草履虫都能学会的STM32平衡小车教程(基础篇)
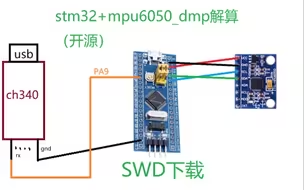
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
平衡小车PID调节过程,直立、速度、转向环,代码开源
STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机 跟随
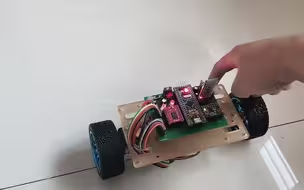
自平衡的双轮小车,通过MPU6050检测到姿态变化,处理器控制电机
STM32 TB6612 电机驱动板控制有刷直流电机 理论+实操
stm32驱动编码器电机测速 stm32+tb6612+编码器电机+OLED显示屏
【开源】浅浅分享一个 stm32平衡车+PID控制+PCB打板 制作过程
【平衡小车】stm32+PID控制+蓝牙平衡小车(资料分享)
烂大街STM32蓝牙平衡小车(开源哦)
开源!!!自制STM32麦轮小车和遥控器
6.代码篇----mpu6050以及PID控制
精简版平衡小车、PID实践/速度环+直立环/mpu6050开源!
基于STM32的自平衡小车!自画PCB,各模块个性化分布。原理图,PCB资料齐全!
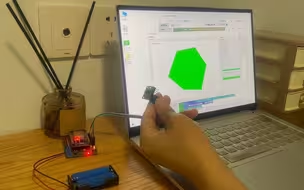
【有手就能做】轻松实现MPU6050位姿传感器数据可视化与保存
stm32 pid 控制编码器电机
stm32平衡小车制作教程 完整的软硬件方案 成本不超200
MPU6050+DMP获取姿态解析
PID平衡小车调参教程
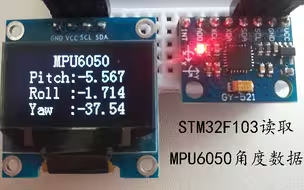
STM32读取MPU6050角度数据
毕业设计,两轮平衡车,stm32芯片,mpu6050。
【干货教程】单片机项目速成-电赛智能送药小车 STM32HAL库CubeMX+串级PID控制+OpenMV数字识别
从不懂到会用!PID从理论到实践~
STM32c8t6通过TB6612控制直流电机
包会!使用STM32F103C8T6驱动TB6612驱动两路电机(视频简介附源码)
[stm32入门教程][STM32实战项目]STM32智能小车V1.5-stm32f103c8t6-stm32最小系统-手把手入门教程-嵌入式开发-嵌入式学习
STM32F103C8T6驱动超声波模块测距(视频简介附源码)
5分钟玩转(mpu6050/陀螺仪/GY-521)角度传感器篇,附源码
STM32控制L298N驱动直流电机-PID闭环控制
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
【平衡小车PID】直立环+速度环完整调参过程 (开源)
STM32入门教程-2023版 细致讲解 中文字幕
【开源啦!】无刷轮腿平衡机器人
stm32平衡小车,完全开源
基于stm32f103的智能蓝牙-循迹-避障小车
STM32超级蓝牙小车——基于STM32F103C8T6的多功能蓝牙小车(PID循迹、跟踪、有源蜂鸣器播放音乐、蓝牙遥控、AD采集+DMA转运等超多元素小车)
学习心得|基于卡尔曼滤波的MPU6050姿态解算
01.直流电机原理与TB6612
[开源]stm32电机位置速度串级pid控制及波形显示