V
主页
京东 11.11 红包
机器人顶会RSS 2024:湖南大学周易教授聊无人机无地图状态评估 - 基于事件的视觉惯性测速仪
发布人
以低录用、严审稿著称的国际机器人顶会RSS 2024上,湖南大学机器人学院周易教授团队@NAIL_HNU 联合港科大沈劭劼团队成功发表论文《Event-based Visual Inertial Velometer》!本期度量访问中,周易教授深入剖析研究思路,并回顾过去三年的研究历程。共同一作:周易、路修远 论文简介: 本文提出了一种基于事件相机和IMU的无地图视觉-惯性测速仪,通过融合异构数据实现无人机实时线性速度估计,解决了激烈自我运动状态下相机跟踪失败问题。 现实实验利用NOKOV度量动作捕捉系统实时监测事件相机的位姿,助力验证本文方法估计线性速度的准确性。 关注公众号“度量的机器人世界”,获取更多无人机相关资讯!
打开封面
下载高清视频
观看高清视频
视频下载器
什么是事件相机 event cameras 如何使用普通相机模拟一个事件相机
30岁,我在浙江大学当教授【ME32】
浙大Science Robotics封面 全自主微型飞行机器人集群
我和我飞导【浙江大学FAST Lab】
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
【浙江大学】浙大博导带你从0制作无人机
【事件相机】什么是事件相机?为什么说它能成为无人机或无人驾驶汽车的眼睛?
浙江大学 FAST-Lab 2021代表性研究成果 | 空中机器人 | 人工智能 | 集群机器人 | 自主导航
Science Robotics 北大刘珂老师分享顶刊经验 软体机器人成果及研究过程 - 机器人学术年会顶刊论坛
无人机倾斜穿越动态狭缝 | 国防科技大学
ROBOMASTER2023-2024 机甲大师高校人工智能挑战赛·精英赛 | 冠军 | Turtle战队 | 完赛视频 | 系统方案 | 算法原理
浙大最新 Science Robotics 微眼动启发的新型事件相机
Prescribed-Time Output Formation Tracking for Heterogeneous Linear MASs
无人机系统 - 高飞组超全讲解!
Motion and Structure From Event-based Normal Flow (ECCV 2024)
ICRA 2024参会攻略:上交王贺升教授教你听会社交两不误【度量访问】
未知复杂环境下基于可视区域的无人机自主探索算法(已投稿IROS2024)
Event-based Visual Inertial Velometer (RSS 2024)
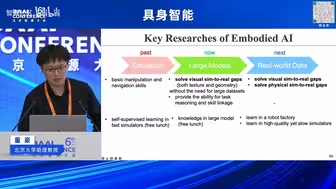
【北京大学-董豪】具身智能关键技术研究:操纵、决策、导航 2024.6
浙大高飞老师团队ICRA 2024:基于主动碰撞的轮式机器人路径规划方法
RSS 2024:Event-based Visual Inertial Velometer
浙大Fast-Lab高飞分享发顶刊Science Robotics T-RO RA-L经验
ICRA 2024专辑:上交王贺升教授聊机器人学术顶会【度量访问】
中科院自动化所蒲志强团队:智能无人集群系统虚实融合闭环验证
协同控制 运动规划等前沿研究 by 代尔夫特理工认知机器人学副教授Javier Alonso-Mora
DVS Seminar Series #3
Event-Aided Time-to-Collision Estimation for Autonomous Driving (ECCV 2024)
《大模型驱动下机器人自主能力的新探索》浙大高飞 牛津赫亮 中大周博宇 苏黎世理工Diego Paez参与讨论 吉大高一星主持 | Star Talk直播回放
邀请报告:面向非结构化场景的通用移动机器人导航系统——焦健浩博士
北理工成果登央视!实现半机械昆虫飞行控制,成功率可达89%
ICRA2024:基于RRT*方法的连续体机器人动态环境轨迹规划
未知复杂环境的无人机自主目标搜寻 四川大学电信学院杨鑫松老师团队
苏黎世大学发布!无需状态估计的视觉像素敏捷飞行
《大模型背景下人机共融的新趋势》讨论 含李飞飞家务机器人成果展示 | Star Talk @ICRA 2024直播回放(英字)
光学动作捕捉系统原理——NOKOV小讲堂
RoboCup 2024机器人世界杯:人形机器人足球攻防灵活 两队交锋
顶刊作者经验分享 - 北大刘珂 上交刘清坤 港中大林天麟 华中科大吴志刚 西安交大田洪淼 - 第五届机器人学术年会顶刊论坛
RoboCup 2024: 中国文化+机器人!上海学生在荷兰讲述民俗故事
ICRA 2024 机械臂&灵巧手 现场深度探访
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!