V
主页
浙大Fast-Lab高飞分享发顶刊Science Robotics T-RO RA-L经验
发布人
继2022年在Science Robotics发表封面文章《全自主微型飞行机器人集群》后,浙大Fast-lab高飞团队于今年五月再度在Science Robotics上发表论文《微眼动启发的新型事件相机》! 在Science Robotics IEEE T-RO RA-L等顶刊上发表文章有什么诀窍?随STAR TALK一探究竟! 更多无人机相关内容,敬请关注公众号【度量的机器人世界】
打开封面
下载高清视频
观看高清视频
视频下载器
浙大Science Robotics封面 全自主微型飞行机器人集群
浙大最新 Science Robotics 微眼动启发的新型事件相机
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
Science Robotics 北大刘珂老师分享顶刊经验 软体机器人成果及研究过程 - 机器人学术年会顶刊论坛
浙大FAST-Lab高飞团队 IROS 2023发布研究新进展
《Nature》刊发了我的成果~Nature编辑特意为我们制作的科普视频,欢迎大家观看讨论~
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
30岁,我在浙江大学当教授【ME32】
机器人顶会RSS 2024:湖南大学周易教授聊无人机无地图状态评估 - 基于事件的视觉惯性测速仪
浙江大学 FAST-Lab FAR 课题组2023代表性研究成果|无人机|人工智能|集群机器人|自主导航
油管看浙大研究的无人机蜂群走红外网 看看各国网友的评论!
【浙江大学】浙大博导带你从0制作无人机
本来很想去 FAST Lab 的......
我和我飞导【浙江大学FAST Lab】
浙大FAST-Lab高飞9/27直播精彩剪辑
Science Robotics | 从液体表面张力获得灵感,研发出”能屈能伸”的可变刚度车轮
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
浙江大学 FAST-Lab 2021代表性研究成果 | 空中机器人 | 人工智能 | 集群机器人 | 自主导航
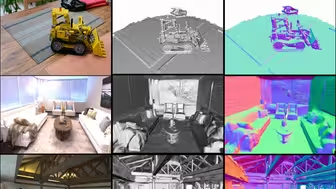
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
[TIV-2024]Air-Ground Collaborative Control for Heterogeneous Formations
无人机和无人车自动对接和分离 | 2023 北京航空航天大学
中科院自动化所蒲志强团队:智能无人集群系统虚实融合闭环验证
《大模型驱动下机器人自主能力的新探索》浙大高飞 牛津赫亮 中大周博宇 苏黎世理工Diego Paez参与讨论 吉大高一星主持 | Star Talk直播回放
RACER: 多无人机协作快速探索 IEEE TRO Best Paper
无人机系统 - 高飞组超全讲解!
RSS 2024:Event-based Visual Inertial Velometer
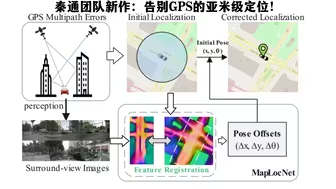
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
未知复杂环境下基于可视区域的无人机自主探索算法(已投稿IROS2024)
高飞老师 “科学脱口秀”-----浙江大学2022年度十大学术进展
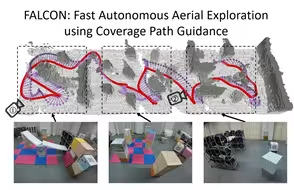
FALCON:快速自主空中探索新基准
RA-L: Flying Calligrapher
隐式扫掠体积SDF:任意形状机器人连续碰撞避免轨迹生成
ROBOMASTER2023-2024 机甲大师高校人工智能挑战赛·精英赛 | 冠军 | Turtle战队 | 完赛视频 | 系统方案 | 算法原理
主编被查!首个IEEE-Trans被“On Hold”!自引率40%,发文量激增!
ICRA2024:基于RRT*方法的连续体机器人动态环境轨迹规划
RoboCup 2024机器人世界杯:人形机器人足球攻防灵活 两队交锋
ICRA 2024 机械臂&灵巧手 现场深度探访
协同控制 运动规划等前沿研究 by 代尔夫特理工认知机器人学副教授Javier Alonso-Mora
聊一聊为什么我能发Nature?——关于我发Nature的那些事
RoboCup 2024: 中国文化+机器人!上海学生在荷兰讲述民俗故事