V
主页
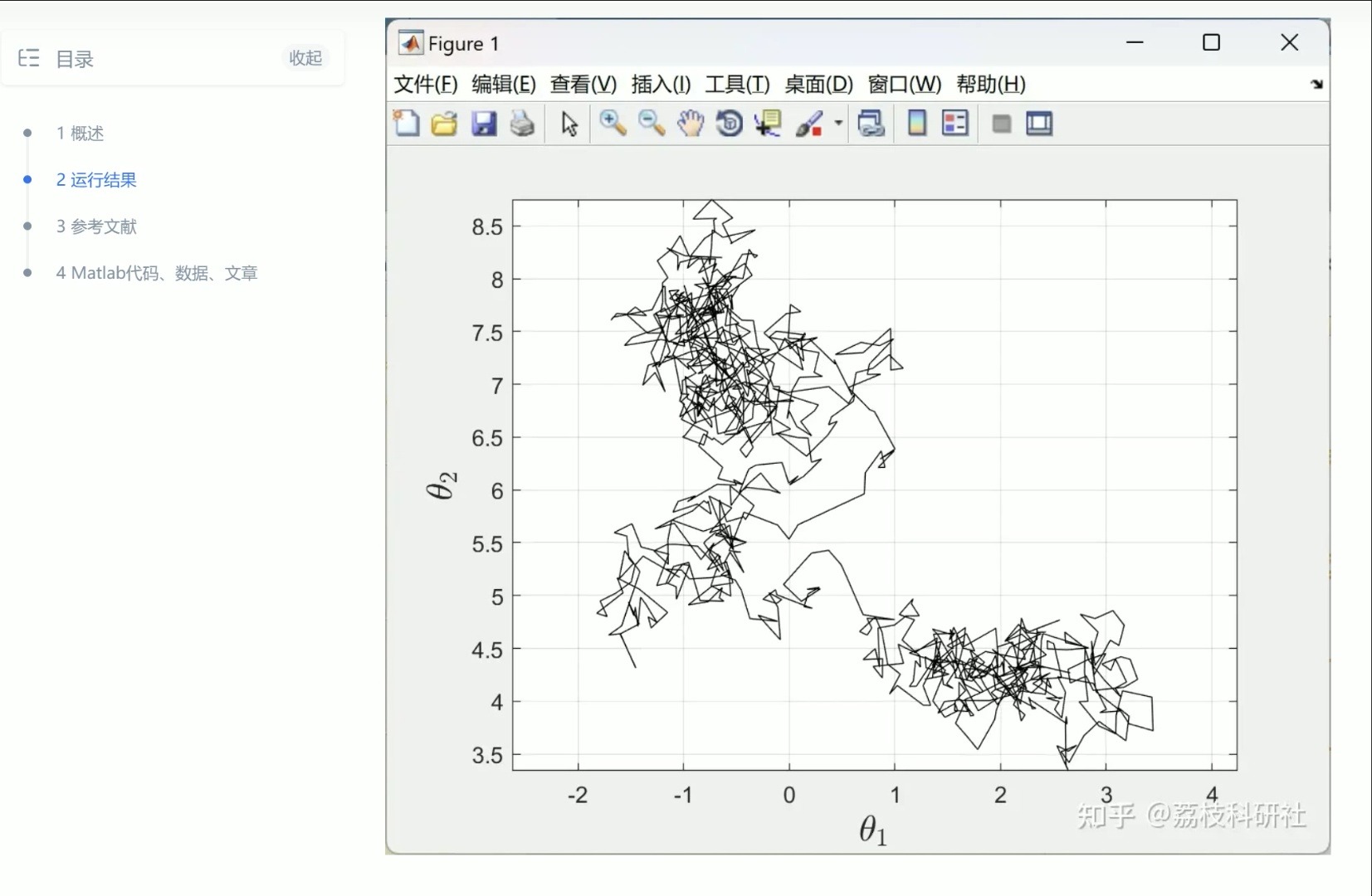
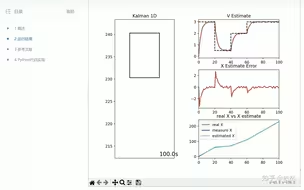
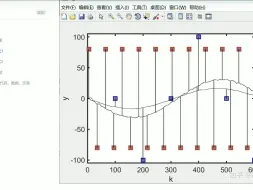
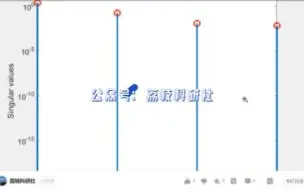
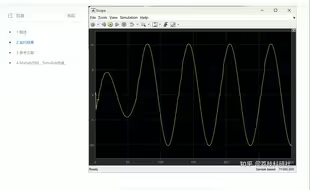
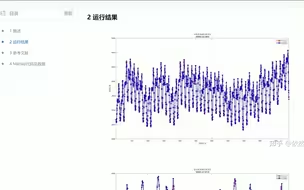
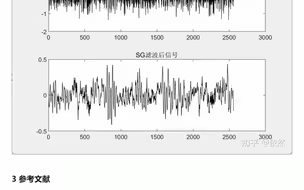
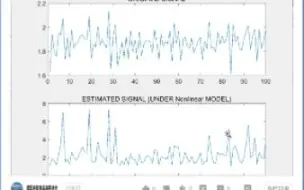
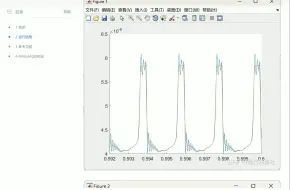
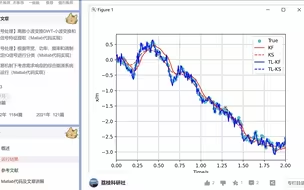
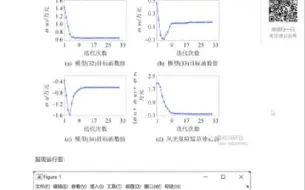
【扩散映射+线性卡尔曼滤波+Koopman算子】一种用于高维非线性随机动力系统状态估计的非参数方法,按照具有各向同性扩散的梯度流演化(Matlab代码实现)
发布人
【扩散映射+线性卡尔曼滤波+Koopman算子】一种用于高维非线性随机动力系统状态估计的非参数方法,按照具有各向同性扩散的梯度流演化(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
【状态估计】【卡尔曼-加权最小二乘(KEWLS)和KEWLS-KF(KKF)】采用低维线性卡尔曼滤波器将单个传感器测量外推、预测到单个估计瞬间,用于WLS多点定
非线性模型预测控制MPC问题求解研究(Matlab代码实现)
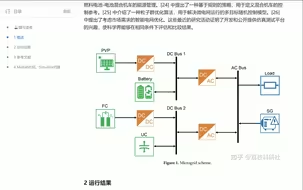
【AC/DC微电网的能源管理策略】微电网仿真模型包括光伏发电机、燃料电池系统、超级电容器和直流侧的电池,包括电压源变换器(VSC),用于将微电网的直流侧与交流侧
基于1D-GAN生成对抗网络的数据生成方法研究(Matlab代码实现)
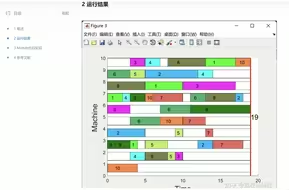
【车间调度】基于卷积神经网络的柔性作业车间调度问题的两阶段算法(Matlab代码实现)
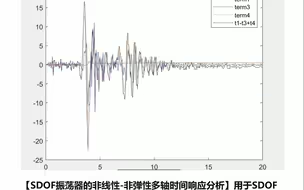
【SDOF振荡器的非线性-非弹性多轴时间响应分析】用于SDOF振荡器非线性非弹性时程分析的鲁棒性分析研究(Matlab代码实现)
基于卡尔曼滤波的MPC汽车控制器研究(Python代码实现)
【状态估计】观测信号(包括异常值)的状态估计方法(Matlab代码实现)
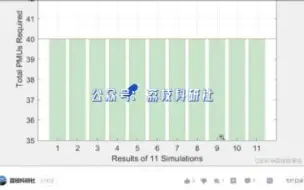
【状态估计】基于随机方法优化PMU优化配置(Matlab代码实现)
基于量子粒子群算法(QPSO)优化LSTM的风电、负荷等时间序列预测算法(Matlab代码实现)
大规模非线性动力系统的高效可识别性、可控性和可观测性检测研究(Matlab代码实现)
基于Lyapunov的控制器设计用于自主水下车辆(AUV)的轨迹跟踪,对于欠驱动的自主水下车辆(AUV)进行二维轨迹跟踪的仿真Lyapunov控制器设计(Sim
【三相太阳能光伏系统控制】在线性和非线性负载条件下模拟额定功率为33kW的三相并网光伏系统,提高电能质量研究(Simulink)
基于卡尔曼滤波的微电网调度(Matlab代码实现)
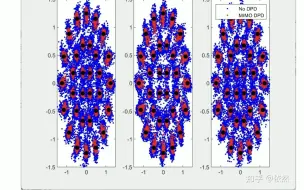
用于非线性多载波卫星信道的多输入多输出符号速率信号数字预失真器DPD(Matlab代码实现)
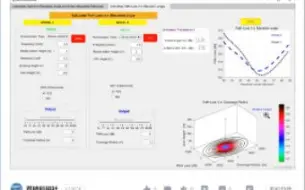
用于无人机到地面路径损耗计算研究(Matlab代码实现)
【LSTM-Attention】基于长短期记忆网络融合注意力机制的多变量时间序列预测研究(Matlab代码实现)
【SG滤波】三阶滤波、五阶滤波、七阶滤波(Matlab代码实现)
【状态估计】无味卡尔曼滤波研究(Matlab代码实现)
【故障诊断】齿轮系统的传递路径分析(TPA)(matlab实现)
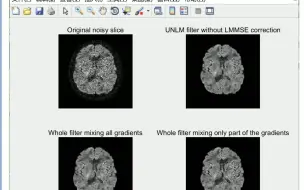
用于弥散加权MRI的关节各向异性维纳滤光片研究(Matlab代码实现)
【改进的多同步挤压变换】基于改进多同步挤压的高分辨率时频分析工具,用于分析非平稳信号(Matlab代码实现)
【SLAM导航】利用激光雷达传感器和角点提取的扩展卡尔曼滤波SLAM,通过激光雷达2D传感器感知墙壁,并使用分割和合并算法提取角点,以及通过最小二乘法进行直线估
【隐式动态求解】使用非线性纽马克方法的隐式动态求解研究(Matlab代码实现)
【无人车路径跟踪】基于神经网络的数据驱动迭代学习控制(ILC)算法,用于具有未知模型和重复任务的非线性单输入单输出(SISO)离散时间系统的无人车的路径跟踪(M
基于级联广义积分器(CGI)的谐波信号提取方法模型(Simulink仿真实现)
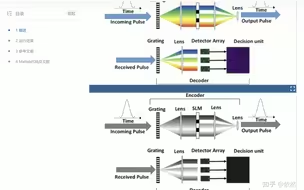
【脉冲通信】用于空间应用的飞秒脉冲通信的符号误码率模型研究(Matlab代码实现)
【状态估计】将变压器和LSTM与卡尔曼滤波器结合到EM算法中进行状态估计(Python代码实现)
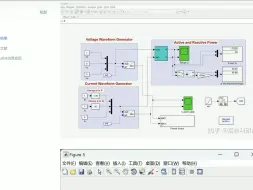
【在dqo坐标系中的主动和无功功率】用于不同微电网之间的功率交换(simulink仿真实现)
一种用于永磁同步电机PMSM的自适应状态反馈速度控制器(Simulink仿真实现)
基于三相pq理论的单相并联有源电力滤波器能够在单相系统中减轻谐波电流,并补偿无功功率(Simulink仿真实现)
【WOA-CNN-LSTM】基于鲸鱼算法优化深度学习预测模型的超参数研究(Matlab代码实现)
【无人机】回波状态网络(ESN)在固定翼无人机非线性控制中的应用(Matlab代码实现)
【无敌方法创新!】基于神经网络的数据驱动迭代学习控制(ILC)算法,用于具有未知模型和重复任务的非线性单输入单输出(SISO)离散时间系统的无人车的路径跟踪(M
【负荷预测】长短期负荷预测(Matlab代码实现)
【无人机路径规划】基于深度强化学习的多无人机辅助边缘计算网络路径规划(Matlab代码实现)
7、基于matlab的贝叶斯线性回归代码详细讲解-线性表达式
【极简步骤】最新Matlab 2024a安装激活教程 附安装密钥 手把手 零基础轻松学会
基于纳什谈判理论的风–光–氢多主体能源系统合作运行方法(Matlab代码实现)
【GPS与高速传感器、尔曼滤波器】使用IMU + GPS数据的姿态和位置参考系统(Matlab代码实现)