V
主页
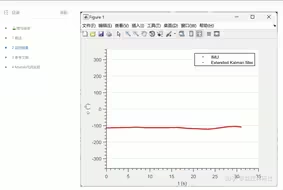
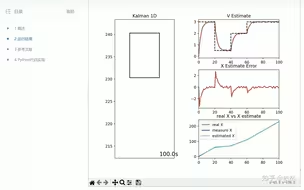
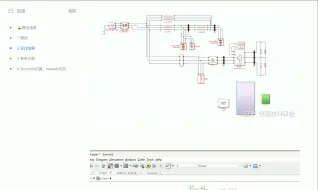
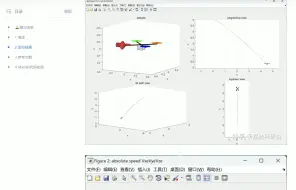
【SLAM导航】利用激光雷达传感器和角点提取的扩展卡尔曼滤波SLAM,通过激光雷达2D传感器感知墙壁,并使用分割和合并算法提取角点,以及通过最小二乘法进行直线估
发布人
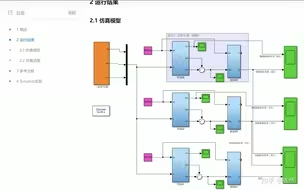
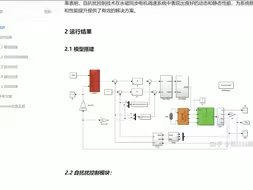
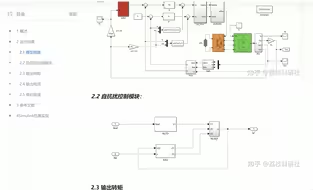
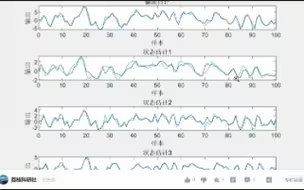
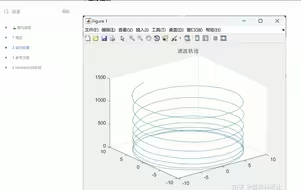
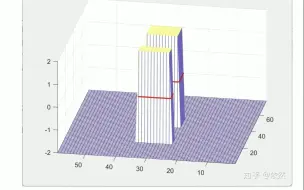
【SLAM导航】利用激光雷达传感器和角点提取的扩展卡尔曼滤波SLAM,通过激光雷达2D传感器感知墙壁,并使用分割和合并算法提取角点,以及通过最小二乘法进行直线估计的SLAM导航(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
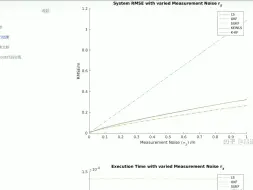
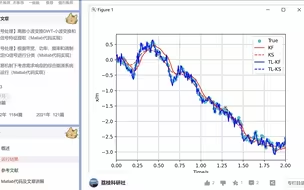
【状态估计】【卡尔曼-加权最小二乘(KEWLS)和KEWLS-KF(KKF)】采用低维线性卡尔曼滤波器将单个传感器测量外推、预测到单个估计瞬间,用于WLS多点定
#三维激光扫描#SLAM移动三维激光扫描仪#手持激光雷达,古镇三维数字化保护
基于级联广义积分器(CGI)的谐波信号提取方法模型(Simulink仿真实现)
【2024年数维杯A题】国际大学生数学建模挑战赛——多源机会信号建模与导航分析(思路、代码......)
真正可用!灵光Lixel的实时点云有多靠谱?|手持激光雷达手持slam
粒子群算法对pi控制器进行参数优化,随时优化pi参数以控制直流无刷电机转速(Simulink仿真实现)
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
[IROS2024] I2EKF-LO:A Dual-Iteration Extended Kalman Filter Based LiDAR Odometry
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
SLAM算法(浙软夏令营)废柴大学生的所作所为
【GPS与高速传感器、尔曼滤波器】使用IMU + GPS数据的姿态和位置参考系统(Matlab代码实现)
【期刊论文】插入WPS中的图片不改变其分辨率的方法
基于卡尔曼滤波的MPC汽车控制器研究(Python代码实现)
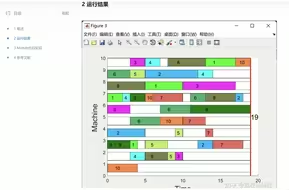
【车间调度】基于卷积神经网络的柔性作业车间调度问题的两阶段算法(Matlab代码实现)
【使用卡尔曼滤波器将陀螺仪和加速度计的读数融合,以获取IMU的姿态(四元数)】实现了所谓的“零速度更新”算法,用于行人跟踪(步态跟踪)(Matlab代码实现)
【状态估计】将变压器和LSTM与卡尔曼滤波器结合到EM算法中进行状态估计(Python代码实现)
基于VSC的STATCOM模型,使用三电平中点钳式电压源变换器进行电压调节的STATCOM模型,在模拟过程中,电压设定值被改变,减小和增加交流电压,STATCO
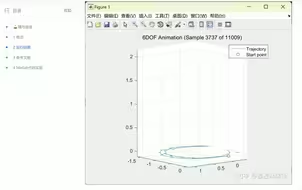
使用四元数进行完整的四轴飞行器动力学模拟,包括螺旋桨空气动力学(Mtlab代码实现)
复杂环境下3D激光SLAM系统研究
非线性模型预测控制MPC问题求解研究(Matlab代码实现)
基于自抗扰控制ADRC的永磁同步电机仿真模型(Simulink仿真实现)
基于Lyapunov的控制器设计用于自主水下车辆(AUV)的轨迹跟踪,对于欠驱动的自主水下车辆(AUV)进行二维轨迹跟踪的仿真Lyapunov控制器设计(Sim
基于MATLAB中雷达和视觉合成数据的目标级传感器融合(Matlab代码实现)
基于自抗扰控制ADRC的永磁同步电机仿真模型(Simulink仿真实现)
基于三相pq理论的单相并联有源电力滤波器能够在单相系统中减轻谐波电流,并补偿无功功率(Simulink仿真实现)
基于量子粒子群算法(QPSO)优化LSTM的风电、负荷等时间序列预测算法(Matlab代码实现)
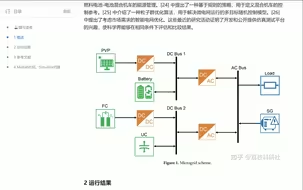
【AC/DC微电网的能源管理策略】微电网仿真模型包括光伏发电机、燃料电池系统、超级电容器和直流侧的电池,包括电压源变换器(VSC),用于将微电网的直流侧与交流侧
[RA-L2023] CamMap:基于SLAM地图对齐方式的非重叠视场相机的外参标定
【混合多电平逆变器】PMSM 使用混合逆变器进行速度控制,通过 2 级和 3 级逆变器开关进行转换(Simulink仿真实现)
控制四旋翼飞行器以进行多目标航点导航的MPC算法(Matlab代码实现)
基于模型参考自适应的永磁同步电机仿真模型(Simulink仿真实现)
【永磁同步电机】基于SVPWM的三电平逆变器PMSM速度控制(Simulink仿真实现)
SLAM导弹:防区外精准打击|F/A-18C
基于卡尔曼滤波的微电网调度(Matlab代码实现)
【GPS+INS在MAV导航上的融合】基于间接卡尔曼滤波的IMU与GPS融合MATLAB仿真(IMU与GPS数据由仿真生成)(Matlab代码实现)
基于PID控制器和卡尔曼滤波器的机器人控制(Matlab代码实现)
【图像分割】距离正则化水平集演化及其在图像分割中的应用(Matlab代码实现)
【微电网优化调度】目标最小化微电网成本,由太阳能电池板阵列和储能系统组成(Python代码实现)
【 PMU】信号生成、采样、分割、估计器应用和误差计算(Matlab代码实现)
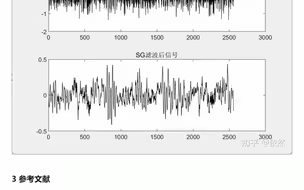
【SG滤波】三阶滤波、五阶滤波、七阶滤波(Matlab代码实现)