V
主页
【无人车路径跟踪】基于神经网络的数据驱动迭代学习控制(ILC)算法,用于具有未知模型和重复任务的非线性单输入单输出(SISO)离散时间系统的无人车的路径跟踪(M
发布人
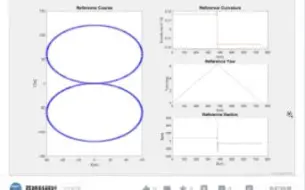
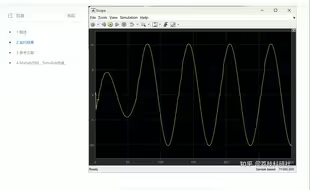
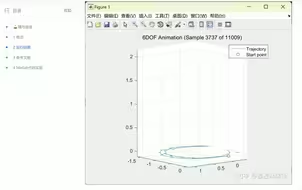
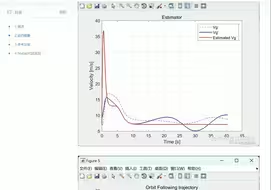
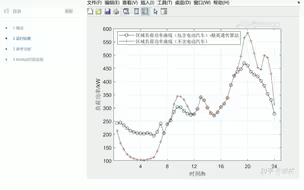
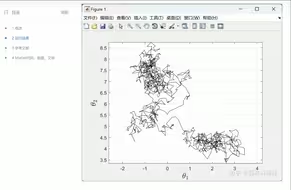
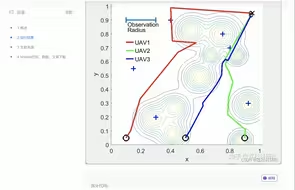
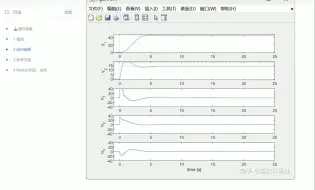
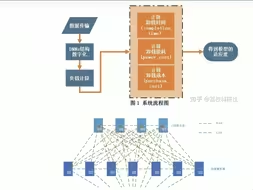
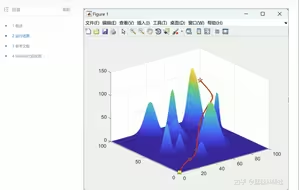
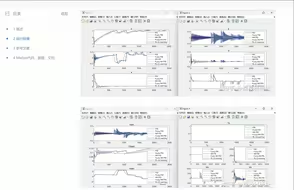
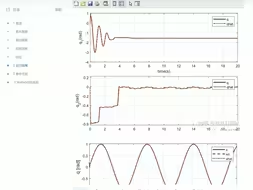
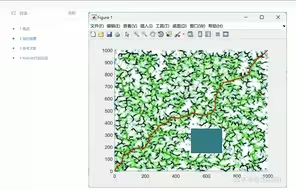
【无人车路径跟踪】基于神经网络的数据驱动迭代学习控制(ILC)算法,用于具有未知模型和重复任务的非线性单输入单输出(SISO)离散时间系统的无人车的路径跟踪(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
【无人车】用于无人地面车辆的路径跟踪算法(Matlab代码实现)
基于Lyapunov的控制器设计用于自主水下车辆(AUV)的轨迹跟踪,对于欠驱动的自主水下车辆(AUV)进行二维轨迹跟踪的仿真Lyapunov控制器设计(Sim
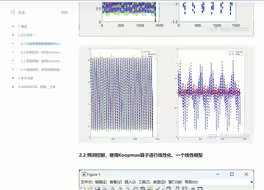
基于数据驱动的 Koopman 算子的递归神经网络模型线性化,用于纳米定位系统的预测控制研究(Matlab代码实现)
线性离散时间系统的H∞跟踪控制:基于无模型Q学习的设计(Matlab代码实现)
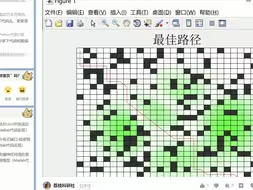
多因素蚁群算法的移动机器人路径规划研究(Matlab代码实现)
【使用卡尔曼滤波器将陀螺仪和加速度计的读数融合,以获取IMU的姿态(四元数)】实现了所谓的“零速度更新”算法,用于行人跟踪(步态跟踪)(Matlab代码实现)
【无人机】基于矢量场法时变未知风环境下无人机自适应路径跟踪研究(Matlab代码实现)
考虑扰动的欠驱动船舶轨迹跟踪自适应滑模控制Matlab/simulink实现模型
【无人船】基于模型预测控制(MPC)对USV进行自主控制研究(Matlab代码实现)
2024世界机器人大会现场,开上“高达”了~
【线性系统反馈控制的设计】多输入多输出线性系统的评估和反馈设计研究(Matlab代码实现)
基于精英遗传算法的电动汽车有序充电方法研究(Matlab代码实现)
看完世界机器人大会,我觉得工业革命快了......
【扩散映射+线性卡尔曼滤波+Koopman算子】一种用于高维非线性随机动力系统状态估计的非参数方法,按照具有各向同性扩散的梯度流演化(Matlab代码实现)
【无人机路径规划】基于深度强化学习的多无人机辅助边缘计算网络路径规划(Matlab代码实现)
【模型预测控制MPC】使用二次规划来模拟多输入多输出(MIMO)系统的模型预测控制(Matlab代码实现)
AI去马赛克真的是好变态啊!
【多种改进粒子群算法进行比较】基于启发式算法的深度神经网络卸载策略研究【边缘计算】(Matlab代码实现)
实验室资源不足,想买卡经费不够怎么办?这期视频一步步教你如何租云GPU跑深度学习模型,不会的看完这期视频就够了! -深度学习/人工智能/神经网络
耗时六个月,我造出了《三体》中机器人刺杀罗辑的KILLER病毒
【路径规划】基于遗传算法(Matlab实现)
什么是卷积?强推!这绝对是全网最通俗易懂的【卷积神经网络教程】!草履虫听了都点头!人工智能、深度学习、机器学习
【水下机器人建模】基于QLearning自适应强化学习PID控制器在AUV中的应用研究(Matlab代码实现)
【路径规划】人工鱼群算法(Matlab实现)
【车间调度】基于卷积神经网络的柔性作业车间调度问题的两阶段算法(Matlab代码实现)
【全108集】花2w买的SD教程!我付费,你白嫖,全程干货无废话,要是还学不会,我退出AI绘画圈!!!零基础Stable Diffusion教程!AI绘画
深度学习 | ICLR 2024 | 即插即用模块 | 计算机视觉任务通用 | MogaNet
【基于全局路径生成最优路径】基于D* Lite和横向避障算法无人驾驶地面车辆的路径规划(Matlab代码实现)
【隐式动态求解】使用非线性纽马克方法的隐式动态求解研究(Matlab代码实现)
基于A算法、Dijkstra算法的路径规划研究(Matlab代码实现)
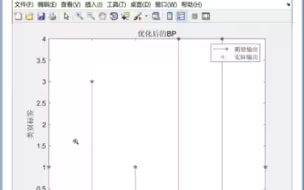
基于GWO-BP灰狼算法优化BP神经网络多维回归预测(Matlab代码实现)
基于RBF神经网络的机械臂运动控制算法(Matlab代码实现)
基于量子粒子群算法(QPSO)优化LSTM的风电、负荷等时间序列预测算法(Matlab代码实现)
MATLAB|基于PID、H_2和H_∞控制器的车辆横向动力学非线性MIMO-PID神经控制器设计
【车间调度】基于卷积神经网络的两阶段算法求解柔性作业车间调度问题(Matlab实现)
【路径规划】2D/3D RRT*算法(Matlab实现)
杰出系友面对面|李沐讲座:大语言模型的实践经验和未来预测
基于灰狼优化算法(GWO)无人机路径规划研究(Matlab代码实现)
四足legged_control实机调试
基于模拟退火算法优化的BP神经网络预测模型(Matlab代码实现)