V
主页
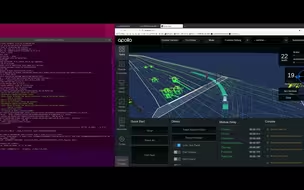
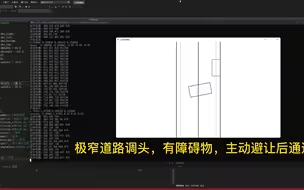
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
发布人
Apollo静态障碍物绕行调试: 包括了3个场景: 1,绕过前方静态障碍物,间距0.5m,不限速; 2,绕过前方静态障碍物,间距1.5m,不限速; 3,绕过前方静态障碍物,间距1.5m,限速; 以及限速部分的代码解读。
打开封面
下载高清视频
观看高清视频
视频下载器
Apollo9.0安装bug解决 - 编译代码演示
【Apollo调试】绕障与跟车测试
【Apollo调试】安装完成,开始调试(基于WSL2)
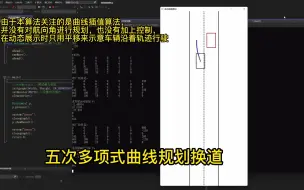
【决策规划算法】五次多项式曲线插值算法(C++)
【Apollo调试】U型弯调头场景(自动驾驶仿真)
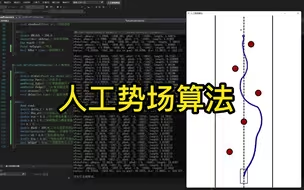
【决策规划算法】人工势场算法(C++)
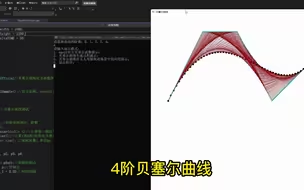
【决策规划算法】贝塞尔曲线(C++)
5分钟回顾极越全新端到端AI智驾发布会高光瞬间!
【Apollo调试】DreamView仿真测试(基于原生Ubuntu20.04)
【Apollo调试】红绿灯场景调试(自动驾驶仿真)
【决策规划算法】调头算法(C++)
无人驾驶来了,司机是很难反抗科技流的
自动驾驶算法的鄙视链
3d驾驶课新闻
萝卜快跑火了,那自动驾驶算法工程师会吃香吗?
【决策规划算法】动态规划与Dijkstra算法(C++)
Apollo新版dreamview太好用了!
自动驾驶算法为什么这么卷?
起猛了,无人驾驶卡车竟然也要来了!
两个萝卜同频行驶
码农新宠!代码神器Cursor火了,8岁女孩轻松驾驭
学A星算法 这门课就够了!
C++代码实现旋转方块的原理讲解
【保姆级】跟着代码学Apollo决策规划 Routing模块4:routing主流程和文件结构
3d驾驶游戏4.0高架警灯但是是国警
FSD V12.5.1.5:芝加哥城区终极压力测试逆天表现!三年来首次0接管
「两条无人驾驶线·同年在此站交汇」【上海地铁】铜川路站 15号线-14号线 换乘过程实录
标星57.2K,近百万研究生收藏的逐行代码解读网站!
【决策规划算法】通过斑马线(C++)
计算机专业非儿戏!计算机专业学姐亲身经历告诉你:慎重考虑,别让辛苦成遗憾!!!
49.线程池和实现
【决策规划算法】人工蚁群算法(C++)
“虽然外表简陋,但我会漂移”(自动驾驶漂移算法 C++编写)
48.C++中三种异步工具的比较
【保姆级】跟着代码学Apollo决策规划 Routing模块6:平面向量的基本概念
学车辆工程可以从事自动驾驶算法吗?
【保姆级攻略】如何正确打开现成的代码?
【保姆级】跟着代码学Apollo决策规划 Routing模块3:接口的数据结构
C++这么复杂为什么不被淘汰?Linux之父:狗都不会学的垃圾语言!
【全网最详细】Linux如何安装最新版GCC和cmake?