V
主页
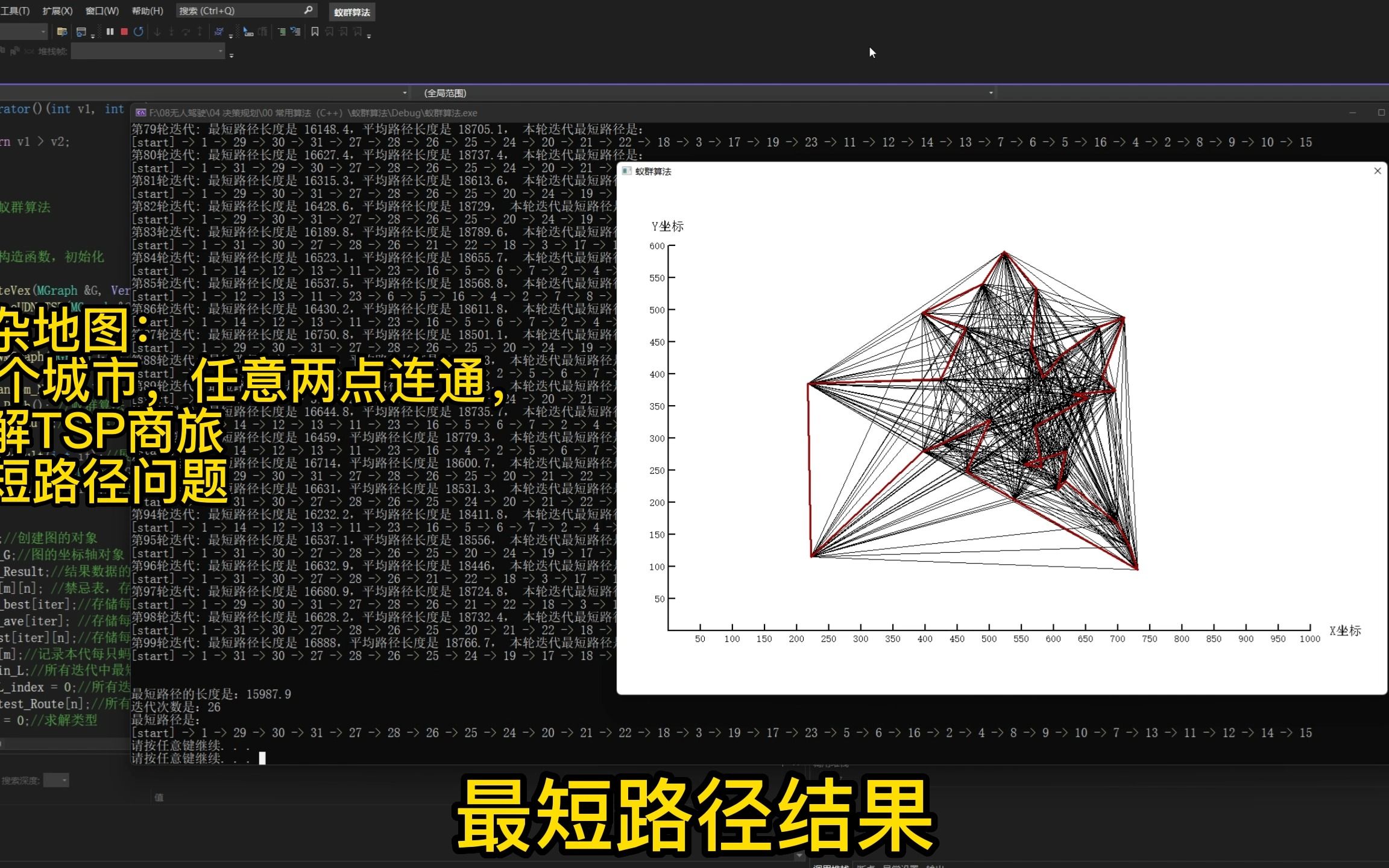
【决策规划算法】人工蚁群算法(C++)
发布人
我用C++写的人工蚁群算法演示,基于easyX库输出图形和迭代过程数据曲线; 源代码已发表至这篇文章:https://zhuanlan.zhihu.com/p/533127173 知乎ID:CODspielen
打开封面
下载高清视频
观看高清视频
视频下载器
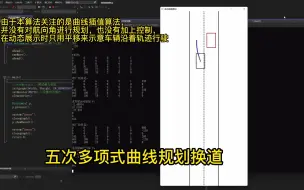
【决策规划算法】五次多项式曲线插值算法(C++)
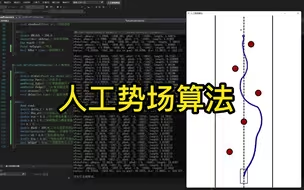
【决策规划算法】人工势场算法(C++)
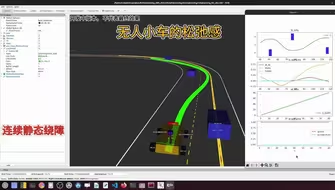
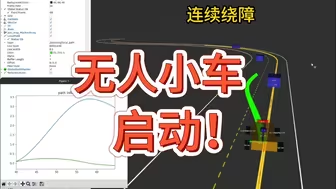
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
《基于ROS2的决策规划算法工程开发》实机演示
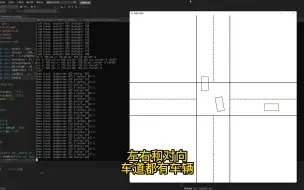
【决策规划算法】无保护左转(C++)
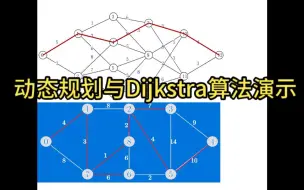
【决策规划算法】动态规划与Dijkstra算法(C++)
【决策规划算法】通过红绿灯(C++)
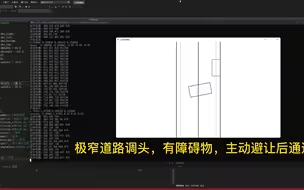
【决策规划算法】调头算法(C++)
“虽然外表简陋,但我会漂移”(自动驾驶漂移算法 C++编写)
【Apollo调试】限速通过减速带
自动驾驶算法的鄙视链
无人驾驶来了,司机是很难反抗科技流的
自动驾驶技术与车车通信技术 带您了解自动驾驶/车车通信
不是,你不要这么稳啊,我算法还没写完~
【保姆级】跟着代码学Apollo决策规划 绪论3:决策规划模块概述
自动驾驶算法为什么这么卷?
【Apollo调试】安装完成,开始调试(基于WSL2)
【决策规划算法】通过斑马线(C++)
【全网最详细】Linux如何安装最新版GCC和cmake?
A星算法很简单吗?
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
【保姆级】跟着代码学Apollo决策规划 Routing模块6:平面向量的基本概念
Carla+ROS2联合仿真测试,像玩极品飞车一样
Astar算法三种类型距离效果演示
【保姆级】跟着代码学Apollo决策规划 Routing模块1:操作演示
【保姆级】跟着代码学Apollo决策规划 Routing模块10:互斥锁、常量指针与指针常量
你离编程高手只差一个手把手的项目
【保姆级】跟着代码学Apollo决策规划 Routing模块8:多态的用法
【决策规划算法】漂移算法(C++)
【C++自动驾驶项目】一辆有灵魂的小车(直线行驶工况合集)
【保姆级】跟着代码学Apollo决策规划 Routing模块7:U型弯的判断
挑战用C++复现李峋同款“跳动的心”
这样的A*算法你会写吗?
【保姆级】跟着代码学Apollo决策规划 Routing模块9:智能指针简介
3d驾驶课新闻
上海轨交终点站合集:龙溪路
Carmaker-Truckmaker生成CM—ROS项目
自动驾驶真的靠谱吗?可能和你想的不一样!
3d驾驶游戏4.0高架警灯但是是国警
萝卜快跑火了,那自动驾驶算法工程师会吃香吗?