V
主页
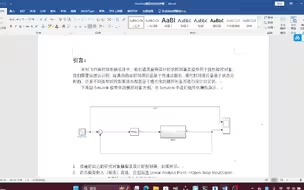
固定翼飞机非线性模型线性化步骤及分析(二)
发布人
本视频演示了如何将一个固定翼B787飞机的非线性模型在配平后的特征点处进行线性化,从而得到一个飞机模型解耦后的线性传递函数以简化表示飞机模型,进而便于后续设计控制器和进行稳定性分析等。该视频分为两个子视频,第二个视频演示了在指定特征点处如何进行飞机模型的配平操作。
打开封面
下载高清视频
观看高清视频
视频下载器
固定翼飞机非线性模型线性化步骤及分析(一)
固定翼飞机机翼设计及气动特性分析
没有天赋,就只能勤练基本功。操作升降舵,和操作副翼舵,必须互不干涉。可以帮助生手,特别是跟我一样没天赋的生手大大降低炸机的几率
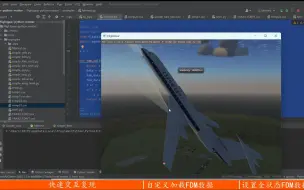
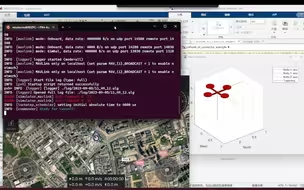
利用Python-Flightgear实现自主飞行任务可视化
PX4飞控的模型在环、软件在环和硬件在环的区别
含有反步法+PID双控制器及风速干扰模型的无人机定点定高控制全系统Simulink模型
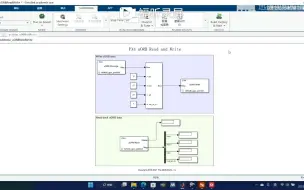
Simulink模型与Python脚本之间数据通信的实现
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
强度拉满?带你疏通离子反应的本质,大彻大悟!还能升级史诗级武器——双线数轴法|2025高考化学|一轮抢先班|14 离子反应的本质
基于Simulink的PX4飞控算法的开发实践(1.硬件支持包配置)
FMS70涵道毒蛇V2垂直坠机最后现场的结果~
基于Simulink的PX4飞控算法的开发实践(6.传感器硬件在环)
基于Simulink的PX4飞控算法的开发实践(3.硬件在环示例模型1演示继续)
WSL下的PX4-QGC-AirSim的虚拟可视化仿真
Pixhawk系列硬件飞控刷写Bootload引导程序的操作
基于Simulink的PX4飞控算法的开发实践(2.硬件在环示例模型1演示)
Flightgear-Simulink联合仿真及自定义配置机型机场的演示
无人机Simscape建模(二)-航迹规划及位姿控制梳理
WSL下的PX4软件和UAV动力学模型在环仿真工作流
基于MBD的四旋翼PID控制器调参效果实际演示
WSL下的PX4与无人机Simulink模型在环仿真的完整演示
使用 Pixhawk2.1Cube 实飞自己的控制器算法效果
WSL下利用QGC操作PX4-Gazebo仿真器完整演示
四旋翼反步法控制仿真模型演示
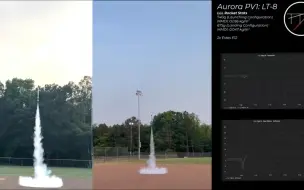
TTB自己制造的火箭回收着陆模型演示
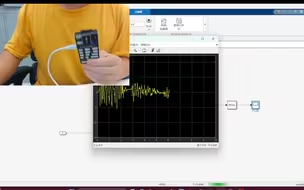
PX4飞控基于惯性传感器数据和Simulink模型的控制器在线开发
实现动态甜甜圈效果竟然只有不到60行代码
PID控制
Ubuntu系统下的PX4纯软件在环联合仿真
基于Simulink的PX4飞控算法的开发实践(7.遥控器硬件在环)
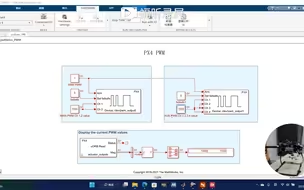
基于Simulink的PX4飞控算法的开发实践(4.硬件在环示例PWM模型2演示)
基于PX4固件利用空速计来测空速的演示
飞控算法测试过程集合
无人机Simscape建模(二)-具体的simscape组件建模过程
Paragliding Explained (一)
电调电机校准操作演示
【一本杨洁】最新视频已上线,快来围观!
无人机Simscape建模(一)
飞控电机顺序测试记录
The essential guide of paragliding at the coast (二)