V
主页
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
发布人
更多NeRF课程就在深蓝学院:NeRF基础与常见算法解析 - 深蓝学院 - 专注人工智能与自动驾驶的学习平台 :https://www.shenlanxueyuan.com/course/664
打开封面
下载高清视频
观看高清视频
视频下载器
计算机视觉最不卷的方向:三维重建学习路线梳理
自动驾驶规划算法岗高频面试题详解
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
CVPR'24 | 4K分辨率实时4D 视图合成,好于eNeRF30倍并达到了最先进的渲染质量
多传感器融合感知
出自谷歌团队,RadSplat: 基于辐射场的高斯喷射,可实现 900+ FPS 的鲁棒实时渲染
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
鲁鹏老师精心打磨的NeRF基础与常见算法解析课程小节:神经网络与位置编码
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
【B站强推!】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,看完小白也能信手拈来,建议收藏!计算机视觉|点云
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
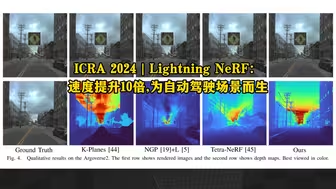
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
基于点云场景的三维物体检测算法及应用
火爆全网的NeRF技术到底是什么黑科技,它与三维重建究竟有什么不同
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
黑神话·悟空爆火,有哪些AI技术在助力?
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
NeRF系列公开课01 | 基于NeRF的三维内容生成
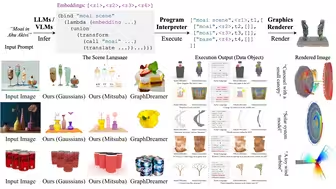
开源 | 场景语言的力量:用程序、单词和嵌入表示 场景,精准描绘3D/4D世界
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
掌握NeRF(神经辐射场),实现3D场景的渲染与交互,感受更加丰富和立体的视觉体验
基于图像的三维重建
视觉SLAMVIO开源代码解析-DSO
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
【MATLAB论文复现】研一研二必看!MATLAB论文如何从代码到公式完整复现?看完这个你就彻底懂了!草履虫都能学会!
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
基于三维点云场景的语义及实例分割
SA-GS:在3D高斯抛雪球中实现SAM任意物体分割,无需任何训练过程和学习参数,通过交互式过程实现3D高斯抛雪球物体分割
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
关于3DGS的最新综述,3D重建与新型视图合成
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
NeRF在机器人技术中 应用的最新综述,旨在为 该领域提供重要参考指南
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
华为诺亚发布!MagicDrive3D适用于街景中的任意视图渲染的可控制的3D生成技术