V
主页
自动驾驶规划算法岗高频面试题详解
发布人
喜欢本讲座的朋友欢迎一键三连呀【点赞/收藏/转发】! 需要本课程的课件的请加V:shenlanyuchen
打开封面
下载高清视频
观看高清视频
视频下载器
多传感器融合感知
【B站第一】阿里大佬带你一周刷完Java高频面试八股文,24年最牛Java短期面试突击面试题(整整200集)看完少走99%弯路!!
4位大佬浅谈自动驾驶行业的未来及发展
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
2021 高翔:视觉SLAM基础
算法岗的招聘现状与未来——移动机器人与自动驾驶专场
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
全面评估BEV感知算法: RoboBEV基准测试与 鲁棒性增强策略探索,
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
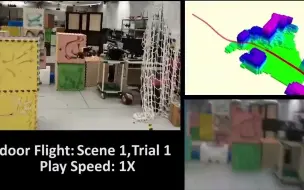
港科大最新工作:无人机快速飞行中智能鲁棒感知和轨迹规划策略
【直播精彩回顾】算法工程师求职沙龙--移动机器人&无人驾驶专场
视觉导航:从状态估计到运动规划
视觉SLAMVIO开源代码解析-DSO
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
NeRF系列公开课01 | 基于NeRF的三维内容生成
100道最新高频机械面试题,助理工程师、机械工程师、锂电、汽车等行业都有设计!从简到难,看到就存下吧!
面向自主移动机器人的感知和规划前沿进展 | 刘勇
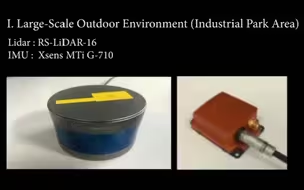
ICRA2020 | 多传感器融合实现点云地图构建 R-LINS
比啃书强十倍!这绝对是目前B站讲的最好的JVM面试题教程,只花3天带你彻底吃透JVM系列|高质量视频全套30集-允许白嫖!!
自动驾驶入门必看,全网最全学习路线及资料,一份文档打包带走!
计算机视觉最不卷的方向:三维重建学习路线梳理
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
深蓝学院精品课程之NeRF基础与常见算法解析:详解什么是神经辐射场
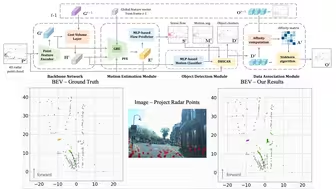
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
高翔SLAM报告:开阔高动态区域的激光融合定位
移动机器人运动规划方法分类
面向移动机器人的道路环境感知-范睿/同济大学教授
Waymo研发经理|自动驾驶感知前沿技术介绍
【高清中文】ORB_SLAM2源码解析
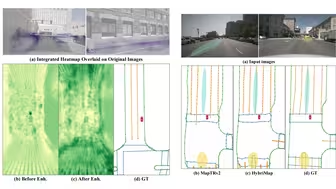
HybriMap:结合PV和BEV特征的高清地图构建技术,实现nuScenes数据集性能提升4%
AR光波导的应用与发展 | 郑昱
2024年Java面试必考篇:Spring夺命连环66问,逼自己3天啃完spring面试核心知识点!拿下面试&涨薪必看!
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
基于三维点云场景的语义及实例分割
『算法可视化』两分钟看懂线性规划
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
融合人与环境的激光雷达三维动态场景感知 | 王程
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"